7.9. Systems of Differential Equations and Scipy#
Reference: Chapter 17 in Computational Nuclear Engineering and Radiological Science Using Python, R. McClarren (2018).
7.9.1. Learning Objectives#
After studying this notebook, completing the activties, and attending class, you should be able to:
Integrate systems of differential equations in Python. Explore the stability and oscillatory properties.
Understand how to implement the different integration methods in scipy.
# import libraries
import numpy as np
import matplotlib.pyplot as plt
import scipy.integrate as integrate
7.9.2. Systems of Differential Equations#
Often we will be concerned with solving a system of ODEs rather than a single ODE. The explicit methods translate to this scenario directly. However, we will restrict ourselves to systems that can be written in the form
In this equation \(\mathbf{A}(t)\) is a matrix that can change over time, and \(\mathbf{c}(t)\) is a function of \(t\) only. For systems of this type our methods are written as follows:
Forward Euler (Explicit)
Backward Euler (Implicit)
which rearranges to
Therefore, for backward Euler we will have to solve a linear system of equations at each time step.
Crank-Nicolson (Implicit)
This will also involve a linear solve at each step.
Fourth-order Runge-Kutta (Implicit)
As noted above, the implicit methods require the solution of the linear system at each timestep, while the explicit methods do not.
We can define these ODE solvers for systems now.
Home Activity
Fill in the missing comments below. This is excellent exam practice.
def forward_euler_system(Afunc,c,y0,Delta_t,numsteps):
"""Perform numsteps of the forward euler method starting at y0
of the ODE y'(t) = A(t) y(t) + c(t)
Args:
Afunc: function to compute A matrix
c: nonlinear function of time
Delta_t: time step size
numsteps: number of time steps
Returns:
a numpy array of the times and a numpy
array of the solution at those times
"""
#
numsteps = int(numsteps)
unknowns = y0.size
#
y = np.zeros((unknowns,numsteps+1))
t = np.arange(numsteps+1)*Delta_t
#
y[0:unknowns,0] = y0
#
for n in range(1,numsteps+1):
yold = y[0:unknowns,n-1]
#
A = Afunc(t[n-1])
#
y[0:unknowns,n] = yold + Delta_t * (np.dot(A,yold) + c(t[n-1]))
return t, y
Class Activity
Share your comments with a partner.
As a test of our method we will solve the ODE:
Wait, that’s not a system, and we haven’t covered how to do ODEs of with derivatives other than first derivatives. We can write this as a system using the definition
to get
7.9.3. Forward (Explicit) Euler#
We’ll set this up in python and solve it with forward Euler. The solution, by the way, is \(y(t) = \cos(t).\)
#Set up A
Afunc = lambda t: np.array([(0,-1),(1,0)])
#set up c
c = lambda t: np.zeros(2)
#set up y
y0 = np.array([0,1])
Delta_t = 0.1
t_final = 8*np.pi
t,y = forward_euler_system(Afunc,c,y0,Delta_t,t_final/Delta_t)
plt.plot(t,y[1,:],'-',label="Forward Euler",color="blue")
t_fine = np.linspace(0,t_final,100)
plt.plot(t_fine,np.cos(t_fine),label="Exact Solution",color="black")
plt.xlabel("t")
plt.ylabel("y(t)")
plt.legend()
plt.title("Solution with $\Delta t$ = " + str(Delta_t))
plt.legend(bbox_to_anchor=(1.05, 1), loc=2, borderaxespad=0.)
plt.show()
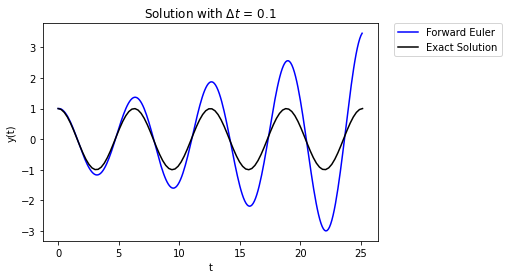
Yikes, the error grows over time. What’s happening here is that the numerical error builds over time and this causes the magnitude to grow over time. Using a smaller value of \(\Delta t\) can help, but not totally remove the problem.
#Set up A function
Afunc = lambda t: np.array([(0,-1),(1,0)])
#set up c
c = lambda t: np.zeros(2)
#set up y
y0 = np.array([0,1])
Delta_t = 0.01
t_final = 18*np.pi
t,y = forward_euler_system(Afunc,c,y0,Delta_t,t_final/Delta_t)
plt.plot(t,y[1,:],'-',label="Forward Euler",color="blue")
t_fine = np.linspace(0,t_final,100)
plt.plot(t_fine,np.cos(t_fine),label="exact solution",color="black")
plt.xlabel("t")
plt.ylabel("y(t)")
plt.legend()
plt.title("Solution with $\Delta t$ = " + str(Delta_t))
plt.legend(bbox_to_anchor=(1.05, 1), loc=2, borderaxespad=0.)
plt.show()
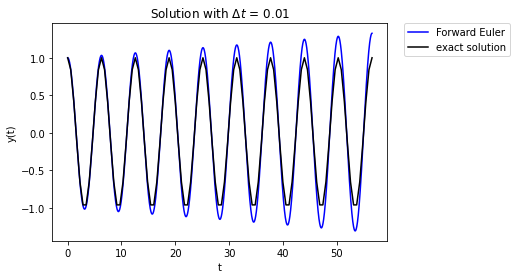
We have really just delayed the inevitable.
Class Activity
Why is this behavior not surprising given what we know about the stability of forward Euler? Discuss with a partner for 30 seconds.
7.9.4. Backward (Explicit) Euler#
Let’s implement backward Euler now; we’ll need a linear solver this time (because A is constant).
Home Activity
Fill in the missing comments below. This is excellent exam practice.
def backward_euler_system(Afunc,c,y0,Delta_t,numsteps):
"""Perform numsteps of the forward euler method starting at y0
of the ODE y'(t) = A(t) y(t) + c(t)
Args:
Afunc: function to compute A matrix
c: nonlinear function of time
y0: initial condition
Delta_t: time step size
numsteps: number of time steps
Returns:
a numpy array of the times and a numpy
array of the solution at those times
"""
#
numsteps = int(numsteps)
unknowns = y0.size
#
y = np.zeros((unknowns,numsteps+1))
t = np.arange(numsteps+1)*Delta_t
#
y[0:unknowns,0] = y0
#
for n in range(1,numsteps+1):
#
yold = y[0:unknowns,n-1]
#
A = Afunc(t[n])
#
LHS = np.identity(unknowns) - Delta_t * A
RHS = yold + c(t[n])*Delta_t
# solving linear system of equations
y[0:unknowns,n] = np.linalg.solve(LHS,RHS)
return t, y
Class Activity
Share your comments with a partner.
Results with \(\Delta t = 0.1\) show that error builds over time.
#Set up A
Afunc = lambda t: np.array([(0,-1),(1,0)])
#set up c
c = lambda t: np.zeros(2)
#set up y
y0 = np.array([0,1])
Delta_t = 0.1
t_final = 8*np.pi
t,y = backward_euler_system(Afunc,c,y0,Delta_t,t_final/Delta_t)
plt.plot(t,y[1,:],'-',label="Backward Euler",color="red")
t_fine = np.linspace(0,t_final,1000)
plt.plot(t_fine,np.cos(t_fine),label="Exact Solution",color="black")
plt.xlabel("t")
plt.ylabel("y(t)")
plt.legend()
plt.title("Solution with $\Delta t$ = " + str(Delta_t))
plt.legend(bbox_to_anchor=(1.05, 1), loc=2, borderaxespad=0.)
plt.show()
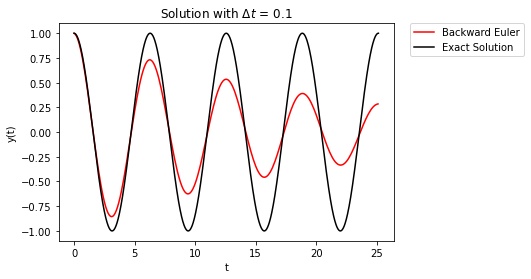
Now the numerical error builds over time, but the error causes the solution to damp out over time. As before, decreasing \(\Delta t\) only delays the onset of the error.
#Set up A function
Afunc = lambda t: np.array([(0,-1),(1,0)])
#set up c
c = lambda t: np.zeros(2)
#set up y
y0 = np.array([0,1])
Delta_t = 0.01
t_final = 8*np.pi
t,y = backward_euler_system(Afunc,c,y0,Delta_t,t_final/Delta_t)
plt.plot(t,y[1,:],'-',label="Backward Euler",color="red")
t_fine = np.linspace(0,t_final,1000)
plt.plot(t_fine,np.cos(t_fine),label="Exact Solution",color="black")
plt.xlabel("t")
plt.ylabel("y(t)")
plt.legend()
plt.title("Solution with $\Delta t$ = " + str(Delta_t))
plt.legend(bbox_to_anchor=(1.05, 1), loc=2, borderaxespad=0.)
plt.show()
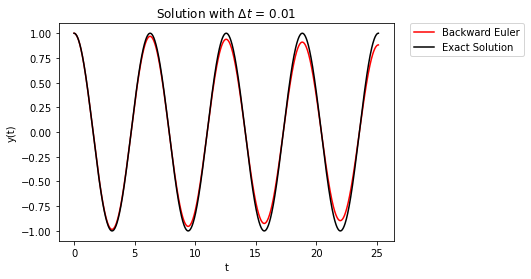
The takeaway here is that first-order accurate methods have errors that build over time. Forward Euler errors cause the solution to grow, whereas, Backward Euler has the solution damp to zero over time.
7.9.5. Crank-Nicolson#
Now we’ll look at Crank-Nicolson to see how it behaves.
def cn_system(Afunc,c,y0,Delta_t,numsteps):
"""Perform numsteps of the forward euler method starting at y0
of the ODE y'(t) = A(t) y(t) + c(t)
Args:
Afunc: function to compute A matrix
c: nonlinear function of time
y0: initial condition
Delta_t: time step size
numsteps: number of time steps
Returns:
a numpy array of the times and a numpy
array of the solution at those times
"""
numsteps = int(numsteps)
unknowns = y0.size
y = np.zeros((unknowns,numsteps+1))
t = np.arange(numsteps+1)*Delta_t
y[0:unknowns,0] = y0
for n in range(1,numsteps+1):
yold = y[0:unknowns,n-1]
A = Afunc(t[n])
LHS = np.identity(unknowns) - 0.5*Delta_t * A
A = Afunc(t[n-1])
RHS = yold + 0.5*Delta_t * np.dot(A,yold) + 0.5*(c(t[n-1]) + c(t[n]))*Delta_t
y[0:unknowns,n] = np.linalg.solve(LHS,RHS)
return t, y
#Set up A
Afunc = lambda t: np.array([(0,-1),(1,0)])
#set up c
c = lambda t: np.zeros(2)
#set up y
y0 = np.array([0,1])
Delta_t = 0.1
t_final = 8*np.pi
t,y = cn_system(Afunc,c,y0,Delta_t,t_final/Delta_t)
plt.plot(t,y[1,:],'-',label="Crank-Nicolson",color="green")
t_fine = np.linspace(0,t_final,100)
plt.plot(t_fine,np.cos(t_fine),label="Exact Solution",color="black")
plt.xlabel("t")
plt.ylabel("y(t)")
plt.legend()
plt.title("Solution with $\Delta t$ = " + str(Delta_t))
plt.legend(bbox_to_anchor=(1.05, 1), loc=2, borderaxespad=0.)
plt.show()
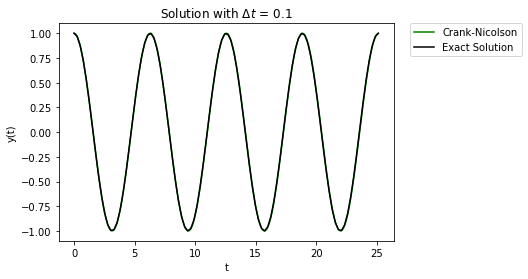
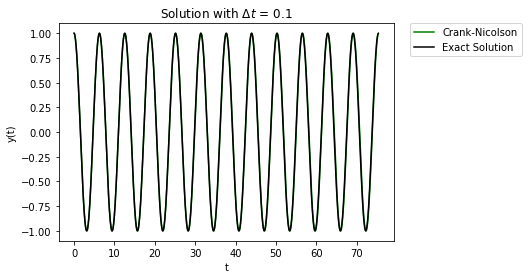
Ahh, that’s much better. The error build up is not nearly as large of a problem. Even if we look at the solution over a much longer time, the error does not affect solution too much:
#Set up A
Afunc = lambda t: np.array([(0,-1),(1,0)])
#set up c
c = lambda t: np.zeros(2)
#set up y
y0 = np.array([0,1])
Delta_t = 0.1
t_final = 24*np.pi
t,y = cn_system(Afunc,c,y0,Delta_t,t_final/Delta_t)
plt.plot(t,y[1,:],'-',label="Crank-Nicolson",color="green")
t_fine = np.linspace(0,t_final,1000)
plt.plot(t_fine,np.cos(t_fine),label="Exact Solution",color="black")
plt.xlabel("t")
plt.ylabel("y(t)")
plt.legend()
plt.title("Solution with $\Delta t$ = " + str(Delta_t))
plt.legend(bbox_to_anchor=(1.05, 1), loc=2, borderaxespad=0.)
plt.show()
7.9.6. Runge-Kutta#
Finally, let’s look at fourth-order Runge-Kutta.
def RK4_system(Afunc,c,y0,Delta_t,numsteps):
"""Perform numsteps of the forward euler method starting at y0
of the ODE y'(t) = f(y,t)
Args:
f: function to integrate takes arguments y,t
y0: initial condition
Delta_t: time step size
numsteps: number of time steps
Returns:
a numpy array of the times and a numpy
array of the solution at those times
"""
numsteps = int(numsteps)
unknowns = y0.size
y = np.zeros((unknowns,numsteps+1))
t = np.arange(numsteps+1)*Delta_t
y[0:unknowns,0] = y0
for n in range(1,numsteps+1):
yold = y[0:unknowns,n-1]
A = Afunc(t[n-1])
dy1 = Delta_t * (np.dot(A,yold) + c(t[n-1]))
A = Afunc(t[n-1] + 0.5*Delta_t)
dy2 = Delta_t * (np.dot(A,y[0:unknowns,n-1] + 0.5*dy1)
+ c(t[n-1] + 0.5*Delta_t))
dy3 = Delta_t * (np.dot(A,y[0:unknowns,n-1] + 0.5*dy2)
+ c(t[n-1] + 0.5*Delta_t))
A = Afunc(t[n] + Delta_t)
dy4 = Delta_t * (np.dot(A,y[0:unknowns,n-1] + dy3) + c(t[n]))
y[0:unknowns,n] = y[0:unknowns,n-1] + 1.0/6.0*(dy1 + 2.0*dy2 + 2.0*dy3 + dy4)
return t, y
#Set up A
Afunc = lambda t: np.array([(0,-1),(1,0)])
#set up c
c = lambda t: np.zeros(2)
#set up y
y0 = np.array([0,1])
Delta_t = 0.1
t_final = 8*np.pi
t,y = RK4_system(Afunc,c,y0,Delta_t,t_final/Delta_t)
plt.plot(t,y[1,:],'-',label="RK4",color="purple")
t_fine = np.linspace(0,t_final,1000)
plt.plot(t_fine,np.cos(t_fine),label="Exact Solution",color="black")
plt.xlabel("t")
plt.ylabel("y(t)")
plt.legend()
plt.title("Solution with $\Delta t$ = " + str(Delta_t))
plt.legend(bbox_to_anchor=(1.05, 1), loc=2, borderaxespad=0.)
plt.show()
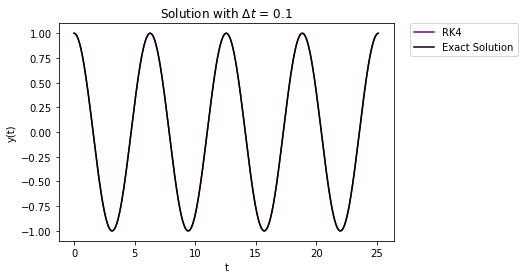
Again, the error buildup is miniscule compared to both Euler methods.
7.9.7. Scipy#
In the last few notebooks, we implemented forward Euler, backward Euler, Crank-Nicolson, and Runge-Kutta methods for a few reasons.
First, I wanted to show you how each method builds on several concepts we already learning this semester. I personally find it very satisfying when I have the “ah ha!” moment of clarity and see how concepts connect. My goal is to help facilitate everyone in the class having their “ah ha” moment.
Second, by seeing the guts of each method, we can better appreciate their strengths and limitations. You can hopefully imagine yourself in a future semester attempting to numerically integrate differential equations for reaction kinetics, but becoming frustrated late at night as a concentration always approaches infinity. While a model mistake is always a possibility, this behavior is not surprising if you are using an explicit method.
Nevertheless, the Scipy package implements all of the methods we discussed this class session. We should take a few minutes to learn how to use them.
Home Activity
Take a few minutes to review the documentation.
https://docs.scipy.org/doc/scipy/reference/integrate.html
We see that Scipy supports several integration methods.
Method Name |
Description |
|---|---|
RK23 |
Explicit Runge-Kutta method of order 3(2) |
RK45 |
Explicit Runge-Kutta method of order 5(4) |
Radau |
Implicit Runge-Kutta method of Radau IIA family of order 5 |
BDF |
Implicit method based on backward-differentiation formulas |
LSODA |
Adams/BDF method with automatic stiffness detection and switching |
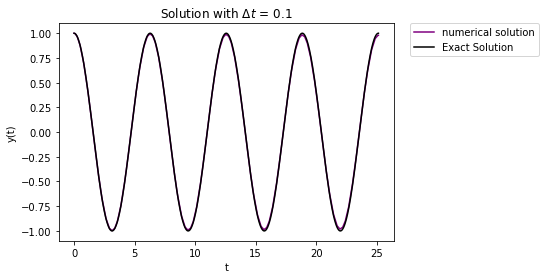
Let’s revisit our multivariate test problem.
# define time range
tspan = [0,t_final]
# tspan = np.arange(0,t_final,Delta_t)
# define function f(t,y)
f_new = lambda t,y: np.array([(0,-1),(1,0)]) @ y
# specify initial condition
y0 = np.array([0,1])
# integration results are stored in 'results' object
results = integrate.solve_ivp(f_new, tspan, y0, method="RK23")
# make plot
plt.plot(results.t,results.y[1,:],'-',label="numerical solution",color="purple")
t_fine = np.linspace(0,t_final,1000)
plt.plot(t_fine,np.cos(t_fine),label="Exact Solution",color="black")
plt.xlabel("t")
plt.ylabel("y(t)")
plt.legend()
plt.title("Solution with $\Delta t$ = " + str(Delta_t))
plt.legend(bbox_to_anchor=(1.05, 1), loc=2, borderaxespad=0.)
plt.show()
# some solver statistics
print("Number of RHS function evaluations:",results.nfev)
print("Number of Jacobian evaluations:",results.njev)
print("Number of LU decompositions:",results.nlu)
Number of RHS function evaluations: 398
Number of Jacobian evaluations: 0
Number of LU decompositions: 0
We just need to adjust method=”RK23” to switch between methods.
Home Activity
In the code above, compare method=”RK23” and method=”RK45”. Look at the plots. In 1 sentence, speculate as to why RK45 requires fewer steps to integrate this problem for a given tolerance.
Record Answer Here:
Below is code that tries all of the methods listed in the table above.
methods = ["RK23", "RK45", "Radau", "BDF", "LSODA"]
for i in methods:
print("Using method",i)
# integration results are stored in 'results' object
results = integrate.solve_ivp(f_new, tspan, y0, method=i)
# some solver statistics
print("Number of RHS function evaluations:",results.nfev)
print("Number of Jacobian evaluations:",results.njev)
print("Number of LU decompositions:",results.nlu)
print("\n")
Using method RK23
Number of RHS function evaluations: 398
Number of Jacobian evaluations: 0
Number of LU decompositions: 0
Using method RK45
Number of RHS function evaluations: 182
Number of Jacobian evaluations: 0
Number of LU decompositions: 0
Using method Radau
Number of RHS function evaluations: 337
Number of Jacobian evaluations: 2
Number of LU decompositions: 10
Using method BDF
Number of RHS function evaluations: 228
Number of Jacobian evaluations: 1
Number of LU decompositions: 20
Using method LSODA
Number of RHS function evaluations: 328
Number of Jacobian evaluations: 0
Number of LU decompositions: 0
Note
Class Discussion: Based on only the output above, which methods are explicit and which methods are implicit? Why?