7.4. Application: Inertial Navigation Systems#
Reference: Chapters 15 and 16 in Computational Nuclear Engineering and Radiological Science Using Python, R. McClarren (2018).
7.4.1. Learning Objectives#
After studying this notebook, completing the activities, and asking questions in class, you should be able to:
Apply integration techniques to realistic scenarios using Python.
# load libraries
import numpy as np
import matplotlib.pyplot as plt
7.4.3. Preliminary Analysis#
We will start by plotting the raw data in Python.
time = np.array([0.0,2.40,3.13,5.27,5.93,6.67,8.00,8.73,9.47,10.13,10.93,11.53,12.27,13.00,13.67,14.40,15.07,16.53,17.20,17.93,18.60,19.33,20.73,21.40,21.47,22.20,22.93,23.60,24.27,25.07,25.13])
weight = np.array([2.770,2.765,2.770,2.765,2.665,2.575,2.605,2.755,2.760,2.765,2.775,2.765,2.760,2.765,2.770,2.765,2.770,2.765,2.770,2.765,2.770,2.765,2.830,2.890,3.000,3.005,2.815,2.810,2.770,2.765,2.765])
plt.plot(time,weight,marker='o',linestyle='',color='blue')
plt.xlabel('Time [seconds]')
plt.ylabel('Measured Weight [kg]')
plt.show()
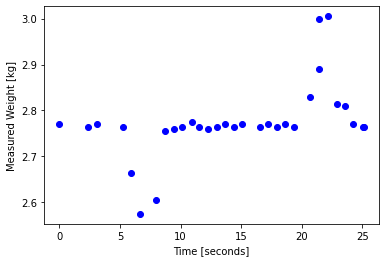
The measured weight decreases and then increases. Which conclusion can you draw from this data and your physical intuition?
The elevator traveled upward.
The elevator traveled downward.
Cannot tell from the data alone.
The elevator traveled updward and then downward, returning to its initial location.
The elevator traveled downward and then upward, returning to its initial location.
Home Activity
Store your answer as an integer in ans_elevator.
# Add your solution here
# Removed autograder test. You may delete this cell.
We will now remove the data prior to 5.27s (but keep it for later) and subtract 5.27 from the remaining times so that your new time vector starts at zero.
# "clipped" time
c_time = time[3:].copy()
# "clipped" weight
c_weight = weight[3:].copy()
# subtract 5.27 seconds. Now adj_time[0] is 0.0
adj_time = c_time - 5.27
print("adj_time:",adj_time)
print("\nc_weight:",c_weight)
adj_time: [ 0. 0.66 1.4 2.73 3.46 4.2 4.86 5.66 6.26 7. 7.73 8.4
9.13 9.8 11.26 11.93 12.66 13.33 14.06 15.46 16.13 16.2 16.93 17.66
18.33 19. 19.8 19.86]
c_weight: [2.765 2.665 2.575 2.605 2.755 2.76 2.765 2.775 2.765 2.76 2.765 2.77
2.765 2.77 2.765 2.77 2.765 2.77 2.765 2.83 2.89 3. 3.005 2.815
2.81 2.77 2.765 2.765]
7.4.4. Free Body Diagram & Acceleration#
Class Activity
Do the following with a partner.
Draw a free body diagram.
Apply Newton’s Laws of Motion.
Using algebra, obtain a formula to calculate acceleration using the rest \((m_0)\) and moving (\(m_t\)) weight of the brick.
Then using the initial weight measured at 5.27s (elevator closing weight) calculate the acceleration at each measurement time and plot it up. Use the local g acceleration for Tempe, AZ (a Google search on “acceleration gravity Tempe Arizona” brings up a fun little Wolfram Alpha widget which yields local g for everywhere in the world – because the world is a slightly oblate spheroid, gravity is higher in northern latitudes).
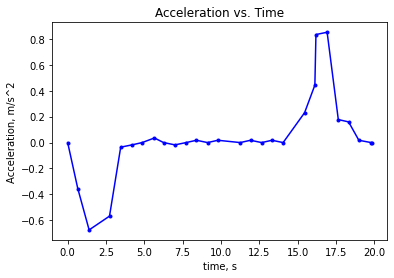
We will now implement our formula to compute the acceleration at each timepoint.
Class Activity
Do the following with a partner.
Use the initial weight measured at 5.27s (elevator closing weight) as \(m_0\). Also use \(g\) = = 9.80561 m/s\(^2\), which is the local gravity acceleration for Tempe, AZ.
Calculate the acceleration of the elevator for each weight measurement.
Plot acceleration versus time.
# Add your solution here
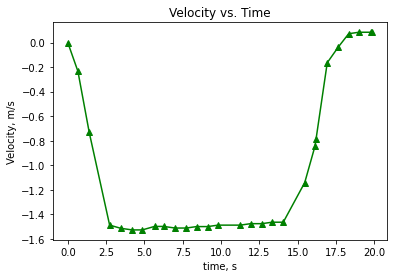
7.4.5. Velocity#
Calculate the velocity at each measurement. Remember, the velocity is just the integral of the acceleration. (Again, recall Physics 1.) Because each data point is given where the scale reading changes, an assumption is that the acceleration is constant prior to the next reading. Thus it is appropriate to use a left edge Riemann sum to get the velocity at all subsequent times (the initial velocity is zero). This is easiest to do with the np.cumsum command. Do this, and plot up the velocity as a function of time. Hint: Assume initial velocity is zero.
# Add your solution here
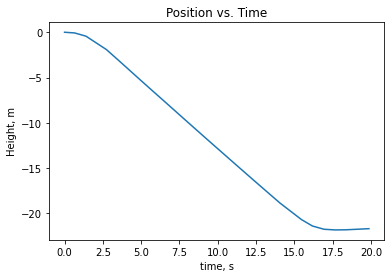
7.4.6. Position#
Finally, calculate the position at each measurement. The position is the integral of the velocity. If the acceleration were constant between each data point, then the velocity will be linear in time between each data point. This suggests that the best way to get the change of position would be to use the trapezoidal rule. Again taking the initial height to be a reference value of zero, do this integration and plot up the height vs. time. Use np.cumsum again. Report the negative of the final height, and divide it by 6 to get the average height of the floors. Hint: Assume initial velocity and initial height are both zero.
# Add your solution here