6.6. Descent and Globalization#
import matplotlib.pyplot as plt
import numpy as np
6.6.1. Define Test Function and Derivatives#
Let’s get started by defining a test function we will use throughout the notebook.
Consider a scalar function \(f(x): \mathbb{R} \rightarrow \mathbb{R}\) to allow for easier visualization. Let
## Define f(x)
f = lambda x : 0.5*(x-1)**4 + (x+1)**3 - 10*x**2 + 5*x
## Define f'(x)
df = lambda x : 6 - 8*x - 3*x**2 + 2*x**3
## Define f''(x)
ddf = lambda x : -8 - 6*x + 6*x**2
plt.figure()
xplt = np.arange(-3,4,0.1)
fplt = f(xplt)
dfplt = df(xplt)
ddfplt = ddf(xplt)
plt.plot(xplt, fplt, label="f(x)", color="b", linestyle="-")
plt.plot(xplt, dfplt, label="f'(x)", color="r", linestyle="--")
plt.plot(xplt, ddfplt, label="f''(x)", color="g", linestyle=":")
plt.xlabel("x")
plt.legend()
plt.grid()
plt.show()
6.6.2. Geometric Insights into Newton Steps#
6.6.2.1. Motivation#
We can interpret Newton-type methods for unconstrained optimization as root finding of \(\nabla f(x) = 0\).
At iteration \(k\), we assemble an approximation to \(f(x)\) using a Taylor series expansion:
and solve for \(p^k\) such that \(f(x^k + p^k)=0\). This gives:
The choice of \(B^k\) determines the algorithm classification:
Pure Newton Method, \(B^k = \nabla^2 f(x^k)\)
Steepest Descent, \(B^k = \frac{1}{\alpha} I\), where scalar \(\alpha\) is sometimes known as the dampening factor
Levenberg-Marquart, \(B^k = \nabla^2 f(x^k) + \delta I\), where scalar \(\delta\) is chosen to ensure \(B^k\) is positive definite.
Broyden Methods, \(B^{k}\) is approximated using history of gradient evaluations, i.e., \(\nabla f(x^0), ... \nabla f(x^k)\). We will study the SR1 and BFGS formulas in this family of methods.
This section explores how choosing \(B^k\) impacts the shape of the approximation and calculated step.
6.6.2.2. Compute and Plot Steps#
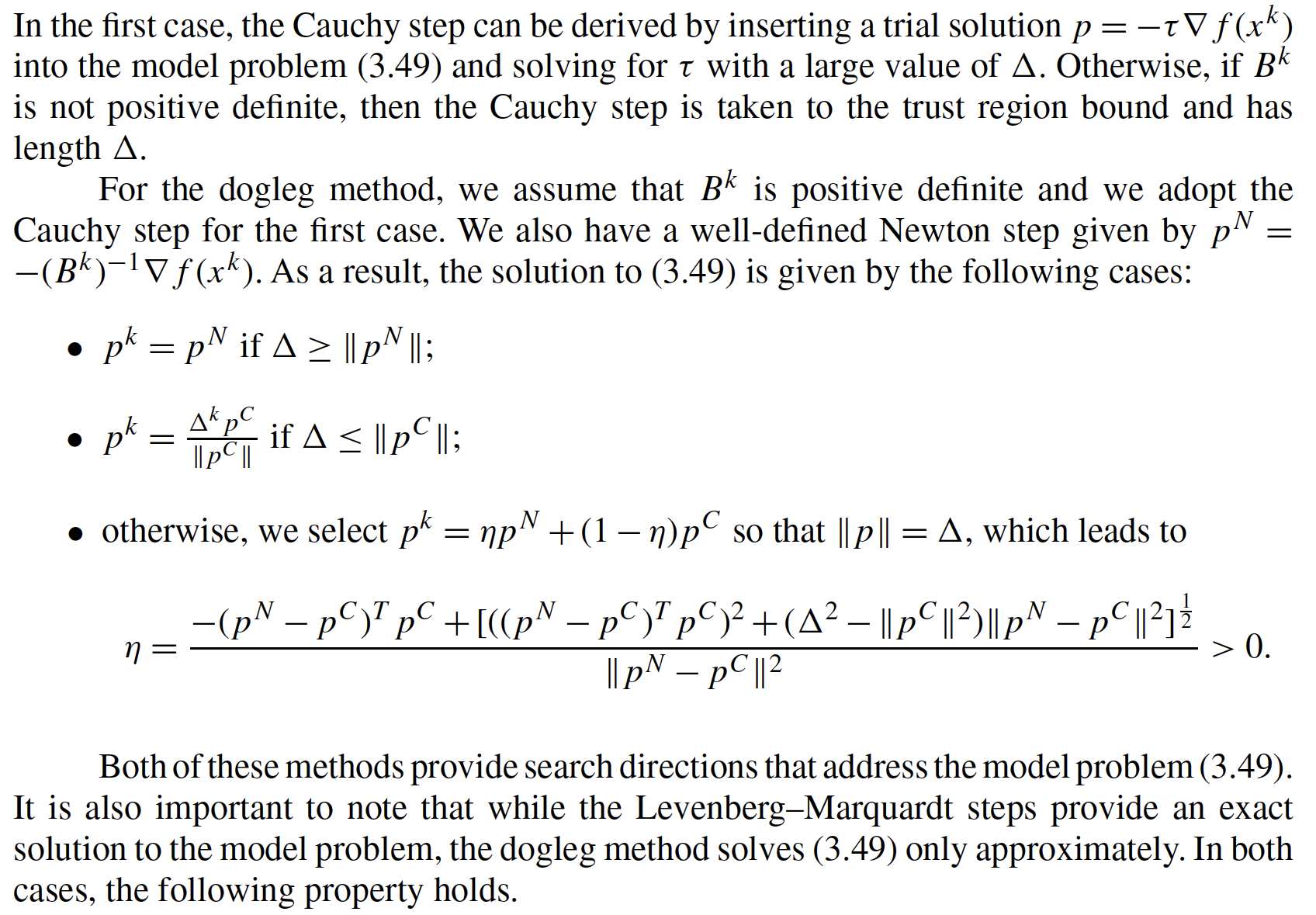
Define a function that:
Computes the i. Newton, ii. Levenberg-Marquardt and iii. Steepest Descent Step for a given starting point \(x_0\)
Plots the step in terms of \(f(x)\) and \(f'(x)\)
def calc_step(x0, epsLM):
# Evaluate f(x0), f'(x0) and f''(x0)
f0 = f(x0)
df0 = df(x0)
ddf0 = ddf(x0)
print("x0 = ",x0)
print("f(x0) =",f0)
print("f'(x0) =",df0)
print("f''(x0) =",ddf0)
### Calculate steps
# Newtwon Step
xN = x0 - df0 / ddf0
print("\n### Newton Step ###")
print("xN = ",xN)
print("pN = xN - x0 = ",xN - x0)
f_xN = f(xN)
print("f(xN) = ",f_xN)
print("f(xN) - f(x0) = ",f_xN - f0)
# Levenberg-Marquardt Step
# Recall the eigenvalue of a 1x1 matrix is just that value
dffLM = np.amax([ddf0, epsLM])
xLM = x0 - df0 / dffLM
print("\n### Levenberg-Marquardt Step ###")
print("xLM = ",xLM)
print("pLM = xLM - x0 = ",xN - x0)
f_xLM = f(xLM)
print("f(xLM) = ",f_xLM)
print("f(xLM) - f(x0) = ",f_xLM - f0)
# Steepest Descent Step
xSD = x0 - df0 / 1
print("\n### Steepest Descent Step ###")
print("xSD = ",xSD)
print("pSD = xSD - x0 = ",xSD - x0)
f_xSD = f(xSD)
print("f(xSD) = ",f_xSD)
print("f(xSD) - f(x0) = ",f_xSD - f0)
### Plot Surrogates on x vs f(x)
### Plot f(x)
plt.figure()
plt.scatter(x0,f0,label="$x_0$",color="black")
plt.plot(xplt, fplt, label="f(x)",color="purple")
### Plot approximation for Newton's method
fN = lambda x : f0 + df0*(x - x0) + 0.5*ddf0*(x-x0)**2
plt.plot(xplt, fN(xplt),label="Newton",linestyle="--",color="red")
plt.scatter(xN, f(xN),color="red",marker="x")
### Plot approximation for LM
fLM = lambda x : f0 + df0*(x-x0) + 0.5*dffLM*(x-x0)**2
plt.plot(xplt, fLM(xplt),label="LM",linestyle="--",color="blue")
plt.scatter(xLM, f(xLM),color="blue",marker="x")
### Plot approximation for SD
fSD = lambda x : f0 + df0*(x-x0) + 0.5*(x-x0)**2
plt.plot(xplt, fSD(xplt),label="Steepest",linestyle="--",color="green")
plt.scatter(xSD, f(xSD),color="green",marker="x")
#plt.plot([x0, xLM],[f0, f(xLM)],label="LM",color="green",marker="o")
#plt.plot([x0,xSD],[f0,f(xSD)],label="Steepest",color="blue",marker="s")
plt.xlim((-3.5,4.5))
plt.ylim((-12.5,22.5))
plt.xlabel("$x$")
plt.ylabel("$f(x)$")
plt.legend()
plt.title("Function and Surrogates")
plt.grid()
plt.show()
### Plot Surrogates on x vs f(x)
plt.figure()
plt.scatter(x0,df0,label="$x_0$",color="black")
plt.plot(xplt, dfplt, label="f'(x)",color="purple")
### Plot approximation for Newton's method
dfN = lambda x : df0 + ddf0*(x-x0)
plt.plot(xplt, dfN(xplt),label="Newton",linestyle="--",color="red")
plt.scatter(xN, df(xN),color="red",marker="x")
### Plot approximation for LM
dfLM = lambda x : df0 + dffLM*(x-x0)
plt.plot(xplt, dfLM(xplt),label="LM",linestyle="--",color="blue")
plt.scatter(xLM, df(xLM),color="blue",marker="x")
### Plot approximation for SD
dfSD = lambda x : df0 + (x-x0)
plt.plot(xplt, dfSD(xplt),label="Steepest",linestyle="--",color="green")
plt.scatter(xSD, df(xSD),color="green",marker="x")
plt.xlim((-3.5,4.5))
plt.ylim((-50,50))
plt.xlabel("$x$")
plt.ylabel("$f'(x)$")
plt.legend()
plt.title("First Derivative and Surrogates")
plt.grid()
plt.show()
6.6.2.3. Consider \(x_0 = -3\)#
calc_step(-3,1E-2)
x0 = -3
f(x0) = 15.0
f'(x0) = -51
f''(x0) = 64
### Newton Step ###
xN = -2.203125
pN = xN - x0 = 0.796875
f(xN) = -8.660857647657394
f(xN) - f(x0) = -23.660857647657394
### Levenberg-Marquardt Step ###
xLM = -2.203125
pLM = xLM - x0 = 0.796875
f(xLM) = -8.660857647657394
f(xLM) - f(x0) = -23.660857647657394
### Steepest Descent Step ###
xSD = 48.0
pSD = xSD - x0 = 51.0
f(xSD) = 2534689.5
f(xSD) - f(x0) = 2534674.5
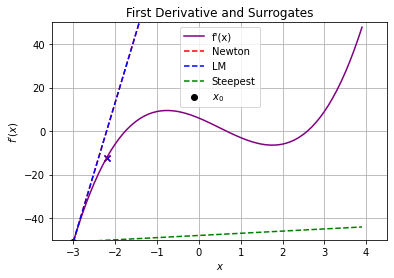
Discussion
In this case, do we expect the Newton and LM steps to be the same? Explain.
Why does \(f(x)\) increase with a steepest descent (\(B^k = I\)) step? I thought the main idea was that because \(B^k\) is positive definite the step is in a descent direction!
6.6.2.4. Consider \(x_0 = 0\)#
calc_step(0,1E-2)
x0 = 0
f(x0) = 1.5
f'(x0) = 6
f''(x0) = -8
### Newton Step ###
xN = 0.75
pN = xN - x0 = 0.75
f(xN) = 3.486328125
f(xN) - f(x0) = 1.986328125
### Levenberg-Marquardt Step ###
xLM = -600.0
pLM = xLM - x0 = 0.75
f(xLM) = 65014556401.5
f(xLM) - f(x0) = 65014556400.0
### Steepest Descent Step ###
xSD = -6.0
pSD = xSD - x0 = -6.0
f(xSD) = 685.5
f(xSD) - f(x0) = 684.0
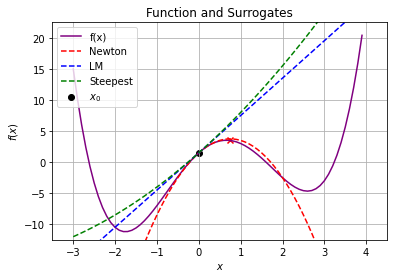
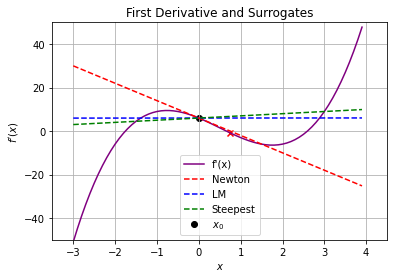
Discussion
Why does \(f(x)\) increase for all of the steps?
Explain Newton-type method in the context of root finding for \(\nabla f(x) = 0\) using the second plot.
6.6.2.5. Descent Properties#
6.6.3. Line Search#
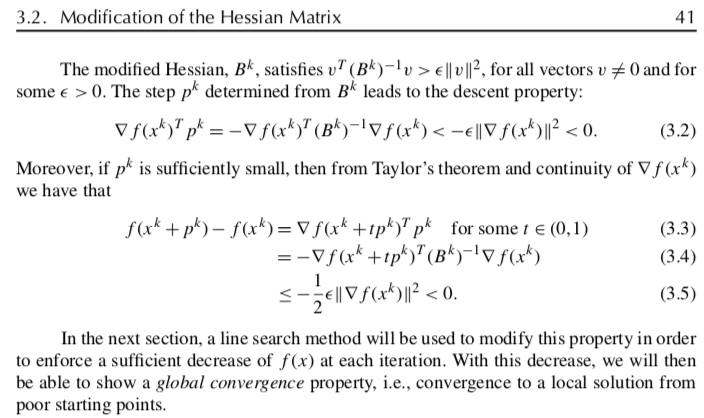
Excerpts from Section 3.4 in Biegler (2010).
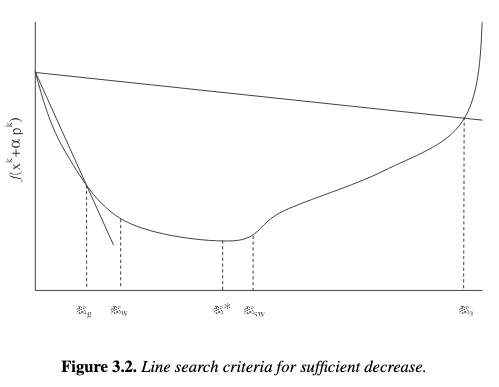
The Wolfe conditions require that (3.31) be satisfied as well as
for \(\zeta \in (\eta, 1)\). From Figure 3.2, we see that \(\alpha \in [\alpha_w, \alpha_a]\) satisfies these conditions.
The strong Wolfe conditions are more restrictive and require satisfaction of
for \(\zeta \in (\eta, 1)\). From Figure 3.2, we see that \(\alpha \in [\alpha_w, \alpha_{sw}]\) satisfies these conditions.
The Goldstein or Goldstein–Armijo conditions require that (3.31) be satisfied as well as

6.6.3.1. Visualization Code#
Goal: Visualize Amijo and Goldstein conditions for an example.
def plot_alpha(xk,eta_ls=0.25,algorithm="newton",alpha_max=1.0):
'''
Calculate step and visualize line search conditions
Arguments:
xk : initial point (required)
eta_ls : eta in Goldstein-Armijo conditions
algorithm : either "newton" or "steepest-descent"
alpha_max : plots alpha between 0 and alpha_max
Returns:
Nothing
Creates:
Plot showing function value and line search conditions as a function of alpha
'''
fxk = f(xk)
dfxk = df(xk)
if(algorithm == "newton"):
pk = - dfxk / ddf(xk)
elif algorithm == "steepest-descent":
pk = - dfxk
else:
print("algorithm argument must be either 'newton' or 'steepest-descent'")
print("Considering xk =",xk,"and f(xk) = ",fxk)
print("Step with",algorithm,"algorithm:")
print("pk = ",pk)
print("With full step, xk+1 =",pk + xk,"and f(xk+1) =",f(xk + pk))
n = 100
alpha = np.linspace(0,alpha_max,n)
fval = np.zeros(n)
for i in range(0,n):
fval[i] = f(xk + alpha[i]*pk)
fs = 18
plt.figure()
# Evaluate f(x^{k+1}) for different alpha values
plt.plot(alpha,fval,color="blue",label=r"$f(x^{k+1})$")
# Armijo condition
arm = np.zeros(n)
for i in range(0,n):
arm[i] = fxk + eta_ls*alpha[i]*dfxk*pk
plt.plot(alpha,arm,color="red",label="Armijo")
# Goldstein condition
gold = np.zeros(n)
for i in range(0,n):
gold[i] = fxk + (1-eta_ls)*alpha[i]*dfxk*pk
plt.plot(alpha,gold,color="green",label="Goldstein")
# Apply backtracking linestep (starting with alpha = alpha_max)
i = n - 1
flag = True
failed = False
while flag:
if i < n-1 and fval[i] < gold[i]:
flag = False
print("Line search failed. Goldstein conditions violated. Consider increasing alpha_max.")
failed = True
# Armijo condition
if fval[i] < arm[i]:
flag = False
else:
i = i - 1
if i < 0:
print("Line search failed. Try decreasing alpha_max.")
failed = True
if not failed:
print("alphak =",alpha[i],"with backtracking line search starting at alpha =",alpha_max)
print("f(xk + alphak*pk) =",fval[i])
plt.scatter(alpha[i],fval[i],marker='x',color='black',label=r"$a^{k}$ for line search")
# Labels
plt.xlabel(r"$\alpha^k$",fontsize=fs)
plt.ylabel(r"$f(x^k + \alpha^k p^k)$",fontsize=fs)
plt.grid()
plt.legend()
plt.show()
6.6.3.2. Newton Step, \(x^k = -3\)#
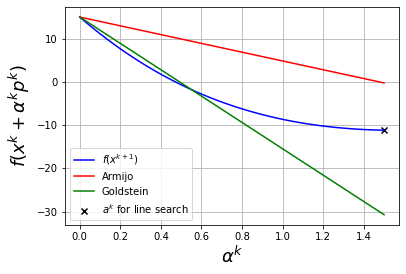
plot_alpha(-3,eta_ls=0.25,algorithm="newton",alpha_max=1.5)
Considering xk = -3 and f(xk) = 15.0
Step with newton algorithm:
pk = 0.796875
With full step, xk+1 = -2.203125 and f(xk+1) = -8.660857647657394
alphak = 1.5 with backtracking line search starting at alpha = 1.5
f(xk + alphak*pk) = -11.1743426900357
Discussion
Why did the backtracking line search stop at \(\alpha^k = \)
alpha_max?Is it possible to find a larger improvement in \(f(x)\) with \(\alpha^k > 1\)?
6.6.3.3. Steepest Descent Step, \(x^k = -3\)#
plot_alpha(-3,eta_ls=0.25,algorithm="steepest-descent",alpha_max=1E-1)
Considering xk = -3 and f(xk) = 15.0
Step with steepest-descent algorithm:
pk = 51
With full step, xk+1 = 48 and f(xk+1) = 2534689.5
alphak = 0.03535353535353535 with backtracking line search starting at alpha = 0.1
f(xk + alphak*pk) = -8.67145500733185
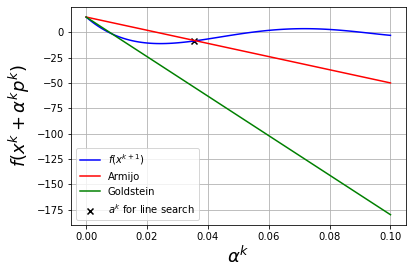
Discussion
Why did the line search stop where the Armijo conditions are satisfied?
Why not further decrease \(\alpha^k\) to achieve a greater improvement in the objective?
6.6.3.4. Newton Step, \(x^k = 0\)#
plot_alpha(0,eta_ls=0.25,algorithm="newton",alpha_max=1.0)
Considering xk = 0 and f(xk) = 1.5
Step with newton algorithm:
pk = 0.75
With full step, xk+1 = 0.75 and f(xk+1) = 3.486328125
Line search failed. Goldstein conditions violated. Consider increasing alpha_max.
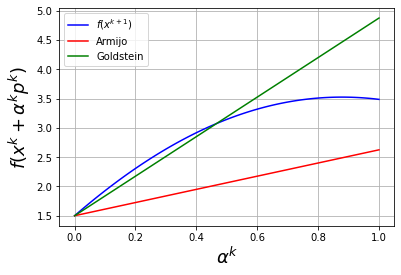
Discussion
Why does the line search fail?
How could we modify Newton’s method to improve robustness?
6.6.3.5. Steepest Descent Step, \(x^k = 0\)#
plot_alpha(0,eta_ls=0.25,algorithm="steepest-descent",alpha_max=5E-1)
Considering xk = 0 and f(xk) = 1.5
Step with steepest-descent algorithm:
pk = -6
With full step, xk+1 = -6 and f(xk+1) = 685.5
alphak = 0.4191919191919192 with backtracking line search starting at alpha = 0.5
f(xk + alphak*pk) = -2.9749848430038526
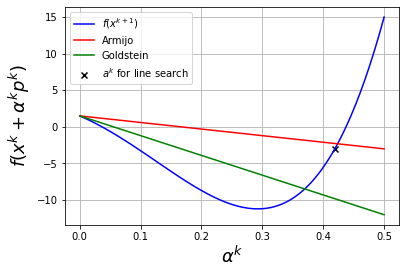
Discussion
How does the region where the Armijo and Goldstein conditions are satisfied change for different values of
eta_ls?
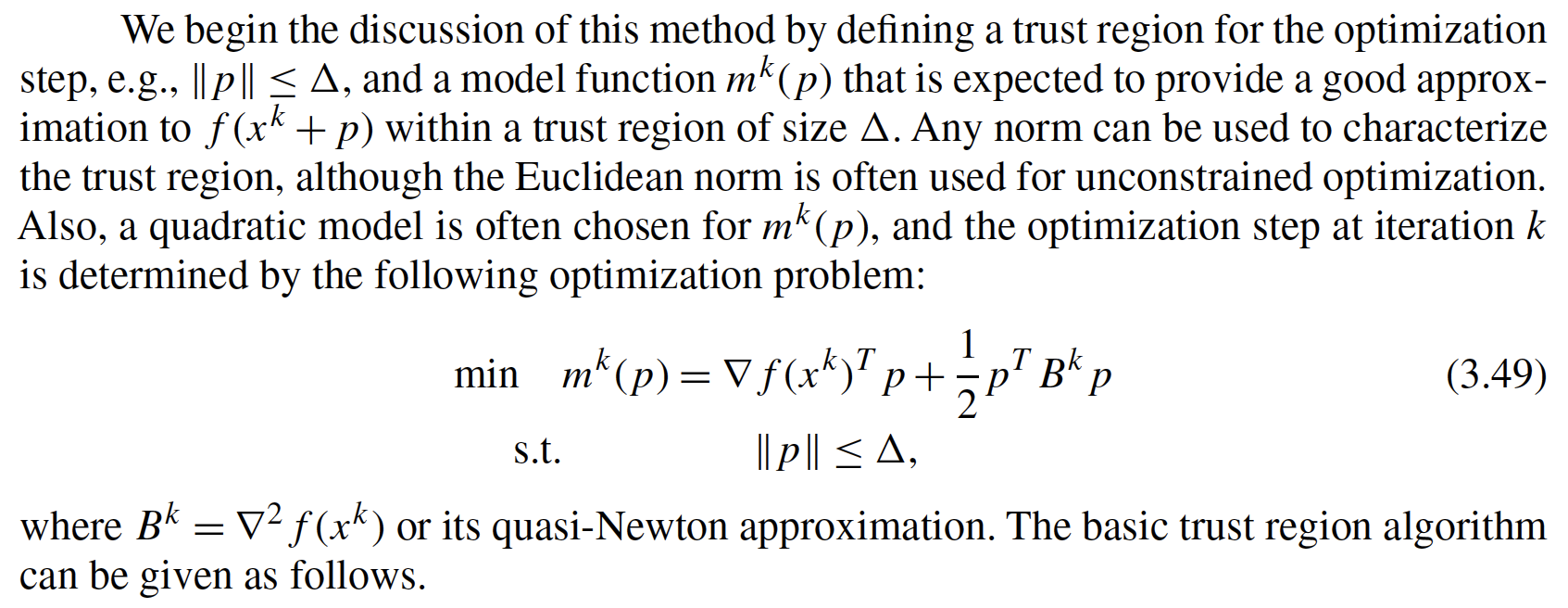
6.6.4. Trust Regions#
Excerpts from Section 3.5 in Biegler (2010).
6.6.4.1. Main Idea and General Algorithm#
6.6.4.2. Trust Region Variations#
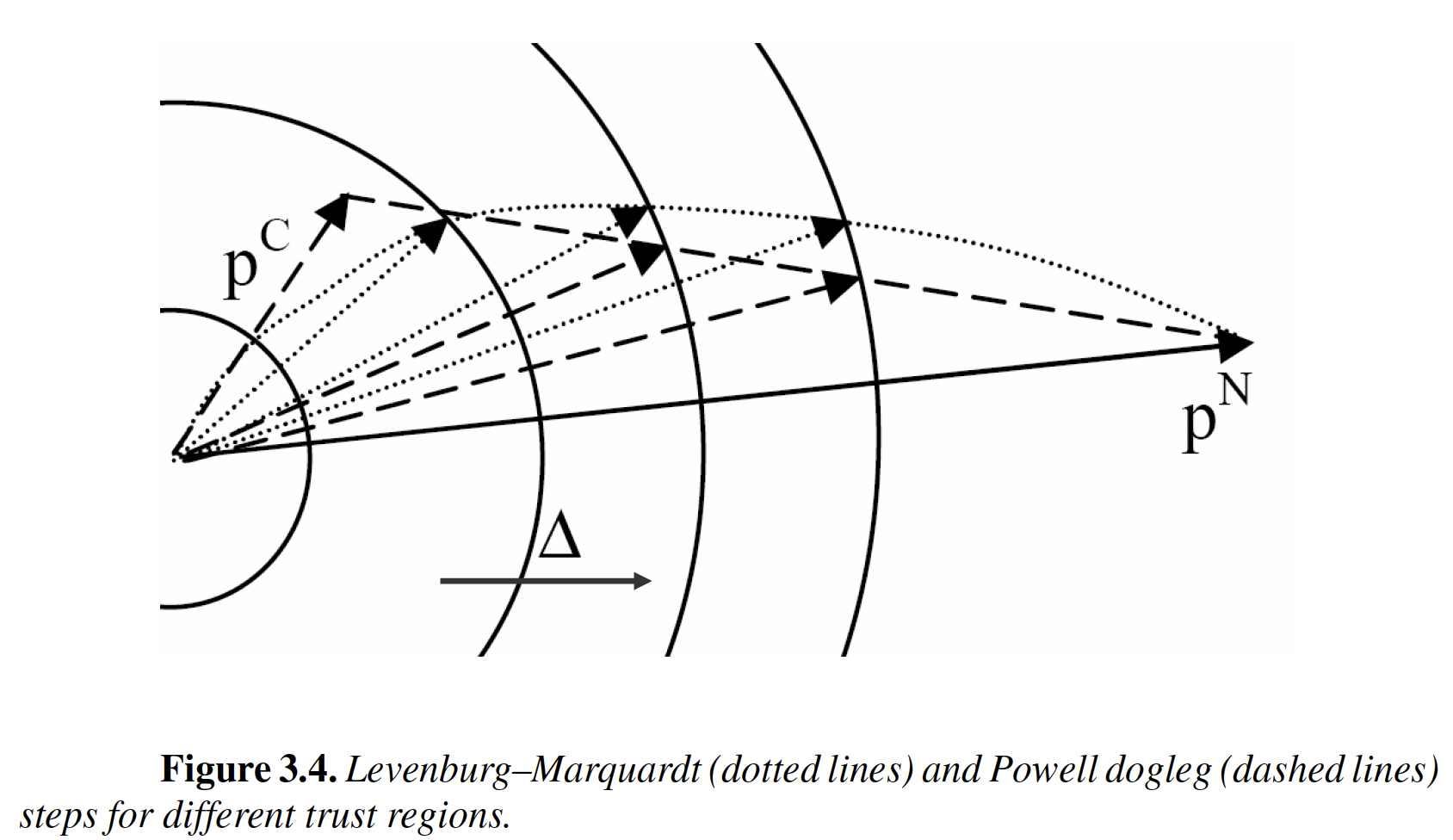
\(p^C\): Cauchy step
\(p^N\): Newton step
6.6.4.2.1. Levenburg-Marquardt#
6.6.4.2.2. Powell Dogleg#