3.8. Analysis of Proportional-Integral Controller#
3.8.1. Learning Objectives#
In this notebook, we will use a mathematical model for the TCLab to design and analyze a PI controller.
After studying this notebook and completing the activities, you will be able to:
Augment the dynamic system model with PI feedback control law to predict closed loop dynamics
Analyze the stability of a (linear) system
Perform a senstivity analysis to tune controller
First, review the proportional only controller notes for modeling details.
# Set default parameters for publication quality plots
import matplotlib.pyplot as plt
SMALL_SIZE = 14
MEDIUM_SIZE = 16
BIGGER_SIZE = 18
plt.rc('font', size=SMALL_SIZE) # controls default text sizes
plt.rc('axes', titlesize=SMALL_SIZE) # fontsize of the axes title
plt.rc('axes', labelsize=MEDIUM_SIZE) # fontsize of the x and y labels
plt.rc('xtick', labelsize=SMALL_SIZE) # fontsize of the tick labels
plt.rc('ytick', labelsize=SMALL_SIZE) # fontsize of the tick labels
plt.rc('legend', fontsize=SMALL_SIZE) # legend fontsize
plt.rc('figure', titlesize=BIGGER_SIZE) # fontsize of the figure title
plt.rc('lines', linewidth=3)
3.8.2. The Proportional-Integral Control Law#
We will consider the proporational control law:
Here, \(K_P > 0\) is the proportional gain, \(K_I > 0\) is the integral gain, and \(e(t) = T_{set} - T_{S,1}(t)\) is the tracking error. For the purposes of stability analysis, we will consider a constant \(T_{set}\).
3.8.3. Closed-Loop Dynamics#
How can we model the integral in the control law? Let’s add a new state to our model for the integral:
We are defining the deviation variables relative to the ambient temperature.
Let’s collect similar terms:
Finally, we can write this as a linear differential equation in matrix form:
If we derivate the system with the deviation terms relative to the setpoint, we get the same \(\mathbf{A}\) matrix.
3.8.4. Numeric Simulation#
3.8.4.1. Closed Loop Continuous#
Let’s simulate the closed loop response.
import matplotlib.pyplot as plt
import numpy as np
from scipy.integrate import solve_ivp
# parameters
T_amb = 21 # deg C
alpha = 0.00016 # watts / (units P1 * percent U1)
P1 = 100 # P1 units
U1 = 50 # steady state value of u1 (percent)
# fitted parameters (see previous lab) for hardware
'''
Ua = 0.0261 # watts/deg C
Ub = 0.0222 # watts/deg C
CpH = 1.335 # joules/deg C
CpS = 1.328 # joules/deg C
'''
# fitted parameters (repeat Lab 3) for TCLab digital twin
Ua = 0.05 # watts/deg C
Ub = 0.05 # watts/deg C
CpH = 5.0 # joules/deg C
CpS = 1.0 # joules/deg C
t_final = 1500
t_step = 1
t_expt = np.arange(0,t_final,t_step)
T_set = 50
def simulate_response(Kp=2.0, Ki=0.1):
""" Simulate the response of the system to a step change in setpoint
(initialized at ambient temperature) with a PI controller.
Arguments:
Kp: proportional gain
Ki: integral gain
Returns:
Nothing
Actions:
Plots the response of the system
"""
A_PI = np.array([[-(Ua + Ub)/CpH, (Ub - alpha*P1*Kp)/CpH, alpha*P1*Ki/CpH],
[Ub/CpS, -Ub/CpS, 0],
[0, -1, 0]])
def deriv3(t, y):
''' RHS of ODE for system dynamics
Arguments:
t: time
y: state vector [T_H1, T_S1, integral]
'''
return A_PI @ y
# Initial point: ambient temperature, I = 0
soln_P = solve_ivp(deriv3, [min(t_expt), max(t_expt)], [T_amb - T_set, T_amb-T_set, 0], t_eval=t_expt)
# Create axes for xyy plot
fig, ax1 = plt.subplots()
# Plot temperatures on left axis
ax1.plot(soln_P.t, soln_P.y[0] + T_set,label='$T_{H,1}$', linestyle='--')
ax1.plot(soln_P.t, soln_P.y[1] + T_set,label='$T_{S,1}$', linestyle='-')
ax1.set_xlabel('Time [s]')
ax1.set_ylabel('Temperature [° C]')
# Plot the integral on the right axis
ax2 = ax1.twinx()
ax2.plot(soln_P.t, soln_P.y[2] ,label='integral', color='green', linestyle='-.')
ax2.set_ylabel('integral [° C s]')
# Add legend
#fig.legend(['T1H','T1S','integral'])
fig.legend(bbox_to_anchor=(0.9, 0.6))
plt.show()
simulate_response(Kp=2.5, Ki=0.01)
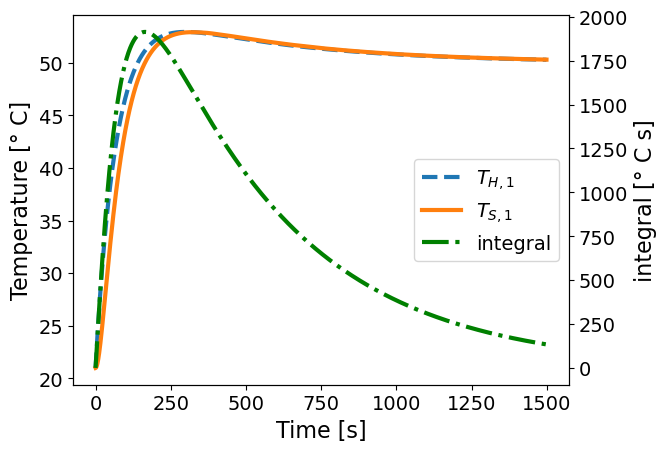
Perform a simple sensitivity analysis and answer the following discussion questions:
What happens with small and large \(K_P\) values? Does the solution overshoot or undershoot? How long does it take to reach the set point?
What happens with small and large \(K_I\) values?
3.8.4.2. Digital Control (Discrete Model)#
from scipy.signal import cont2discrete
def continuous_system(Kp, Ki):
''' Continous system for TCLab with PI control
Arguments:
Kp: the proportional control gain
Ki: the integral control gain
Returns:
A, B, C, D: the state space matrices
'''
A = np.array([[-(Ua + Ub)/CpH, (Ub - alpha*P1*Kp)/CpH, alpha*P1*Ki/CpH],
[Ub/CpS, -Ub/CpS, 0],
[0, -1, 0]])
B = np.array([[alpha*P1*Kp/CpH], [0], [1]])
C = np.array([[0, 1, 0]])
D = np.array([[0]])
return A, B, C, D
def discrete_system(Kp, Ki):
''' Discrete system for TCLab with PI control
Arguments:
Kp: the proportional control gain
Returns:
Ad, Bd, Cd, Dd: the state space matrices
Notes:
The time step is assumed to be 1 second
'''
A, B, C, D = continuous_system(Kp, Ki)
d_system = cont2discrete((A, B, C, D), 1, method='zoh')
# Extract the discrete time A and B matrices
Ad = d_system[0]
Bd = d_system[1]
Cd = d_system[2]
Dd = d_system[3]
return Ad, Bd, Cd, Dd
Ad, Bd, Cd, Dd = discrete_system(Kp=1.0, Ki= 0.1)
print("Ad=\n",Ad)
print("Bd=\n",Bd)
print("Cd=\n",Cd)
print("Dd=\n",Dd)
Ad=
[[ 9.80361050e-01 6.41040825e-03 3.16838748e-04]
[ 4.82847849e-02 9.51390179e-01 7.81612483e-06]
[-2.44253901e-02 -9.75465854e-01 9.99997379e-01]]
Bd=
[[3.32733054e-03]
[8.07818077e-05]
[9.99973137e-01]]
Cd=
[[0 1 0]]
Dd=
[[0]]
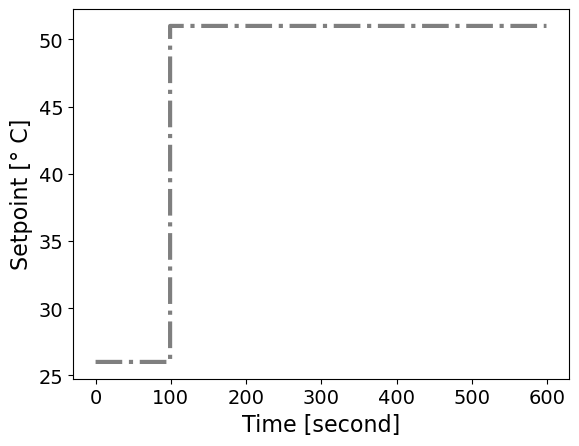
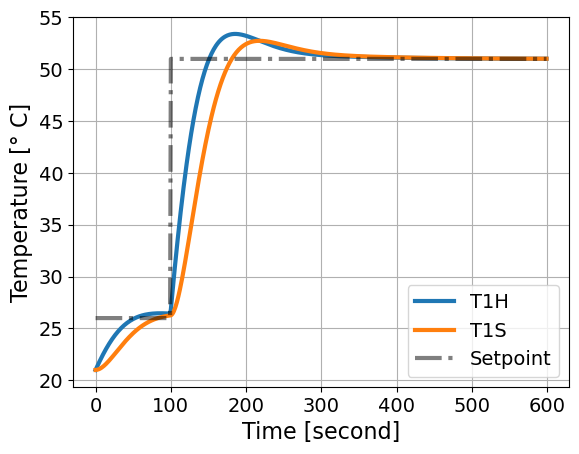
Next, let’s consider the system responding to a setpoint starting at 5C above ambient and then increasing to 430C above ambient at 100 seconds.
t = np.arange(0, 600, 1)
T_set = np.ones(t.shape)*5
T_set[100:] = 30
plt.step(t, T_set + T_amb, linestyle='-.', color='black', alpha=0.5)
plt.xlabel('Time [second]')
plt.ylabel('Setpoint [° C]')
plt.show()
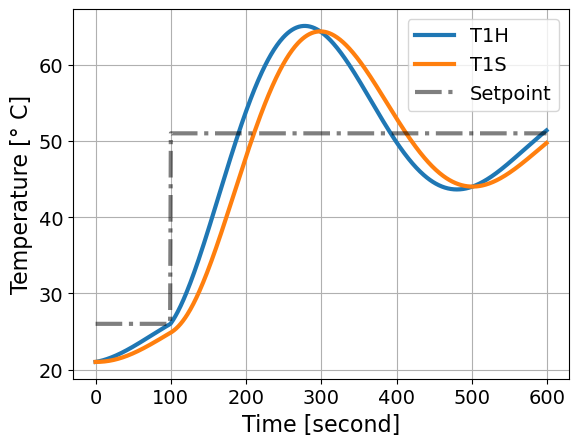
Next, let’s simulate the response of the continous system.
from scipy.signal import lsim, lti
def simulate_response_continous(Kp=1.0, Ki = 0.1):
c_system = lti(*continuous_system(Kp, Ki))
T, yout, xout = lsim(c_system, T_set, t, X0=[0, 0, 0])
plt.plot(t, xout[:,0] + T_amb, label='T1H')
plt.plot(t, xout[:,1] + T_amb, label='T1S')
plt.plot(t, T_set + T_amb, label='Setpoint', linestyle='-.', color='black', alpha=0.5)
plt.xlabel('Time [second]')
plt.ylabel('Temperature [° C]')
plt.grid()
plt.legend()
plt.show()
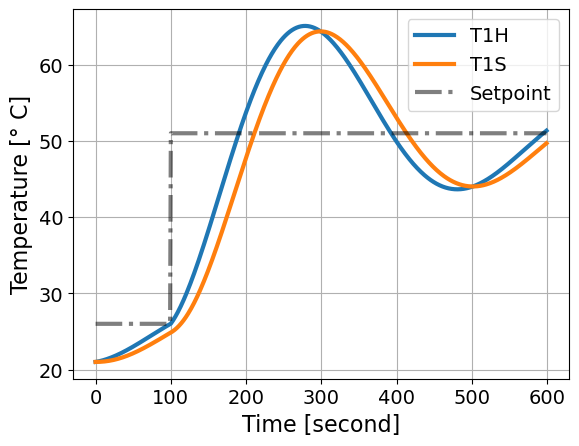
simulate_response_continous(Kp=1.0, Ki=0.1)
simulate_response_continous(Kp=1.0, Ki=0.05)
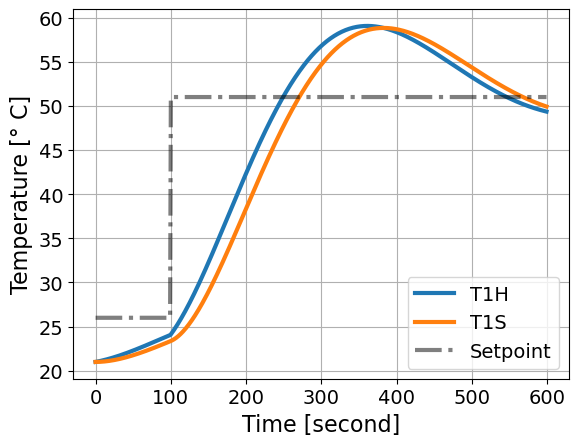
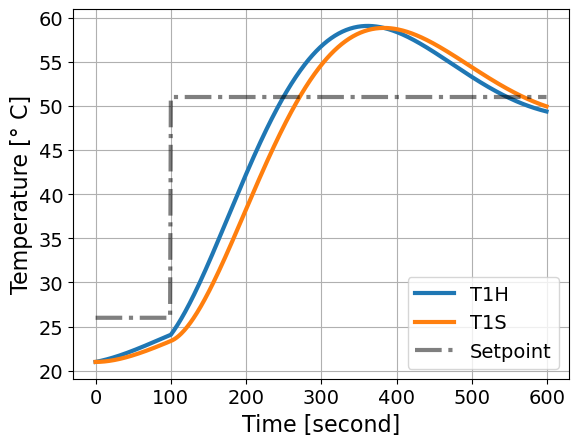
simulate_response_continous(Kp=10.0, Ki=0.1)
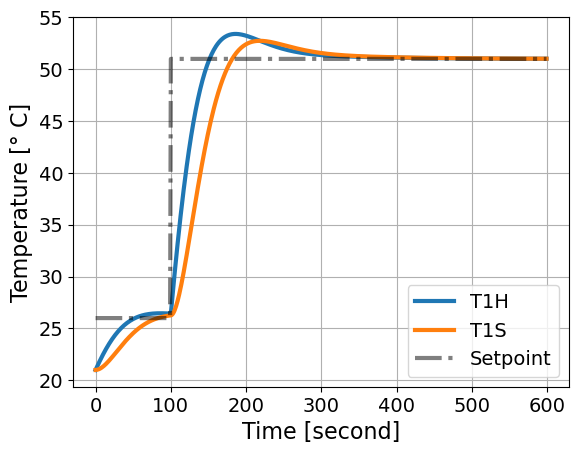
Next, let’s simulate the discrete time system.
from scipy.signal import dlti, dlsim
def simulate_response_discrete(Kp=1.0, Ki = 0.1):
d_system = dlti(*discrete_system(Kp, Ki))
T, yout, xout = dlsim(d_system, T_set, t)
plt.plot(t, xout[:,0] + T_amb, label='T1H')
plt.plot(t, xout[:,1] + T_amb, label='T1S')
plt.plot(t, T_set + T_amb, label='Setpoint', linestyle='-.', color='black', alpha=0.5)
plt.xlabel('Time [second]')
plt.ylabel('Temperature [° C]')
plt.grid()
plt.legend()
plt.show()
simulate_response_discrete(Kp=1.0, Ki=0.1)
simulate_response_discrete(Kp=1.0, Ki=0.05)
simulate_response_discrete(Kp=10.0, Ki=0.1)
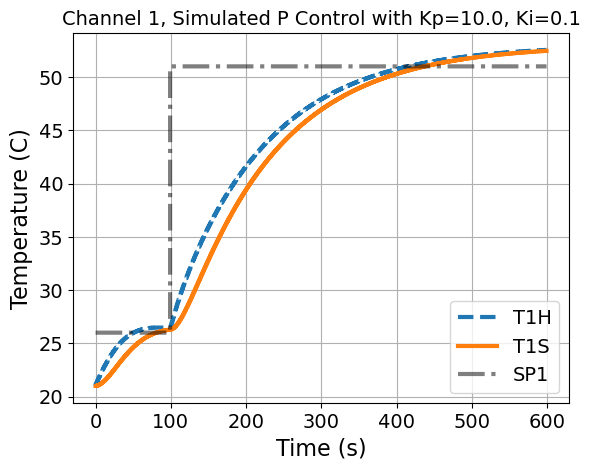
Finally, we can simulate the response using the difference equation and implementing the control logic ourselves.
import pandas as pd
def tclab_simulate_PI(Kp = 1.0, Ki = 0.1, verbose=False, plot=True):
''' Simulate the TCLab system with PI control
Arguments:
Kp: the proportional control gain
Ki: the integral control gain
verbose: print matrices, default is False
plot: create plots, default is True
Returns:
data: DataFrame with columns for Time, T1, T2, Q1, Q2
'''
n = len(t)
assert len(T_set) == n, 'Setpoint array must have the same length as time array'
# Original open loop state space model
A = np.array([[-(Ua + Ub)/CpH, Ub/CpH], [Ub/CpS, -Ub/CpS]])
B = np.array([[alpha*P1/CpH], [0]])
C = np.array([[0, 1]])
D = np.array([[0]])
Ad, Bd, Cd, Dd, dt = cont2discrete((A, B, C, D), dt=1, method='zoh')
# Initialize state matrix
X = np.zeros((n, 2))
# Initialize input matrix
U = np.zeros((n, 1))
# Initialize the integral term
integral = 0
# Loop over time steps
for i in range(n):
# Current state
x = X[i, :]
# Unpack into individual states
T1H, T1S = x
# Integrate the error
integral += (T_set[i] - T1S)
# Temperature control
# Channel 1
# Hint: Write code below to set U[i,0]
# Look at the equations you wrote down for the relay controller
U[i, 0] = Kp*(T_set[i] - T1S) + Ki*integral
# Limit the power levels
U[i, 0] = max(0, min(100, U[i, 0]))
# Update state
if i < n-1:
# Do not update the state for the last time step
# We want to update U and SP for plotting
X[i + 1, :] = Ad @ x + Bd @ U[i, :]
# Shift states from deviation variables to absolute values
X += T_amb
# Create DataFrame
data = pd.DataFrame(X, columns=['T1H', 'T1S'])
data['Time'] = t
data['Q1'] = U[:, 0]
data['SP1'] = T_set + T_amb
if plot:
plt.title('Channel 1, Simulated P Control with Kp={}, Ki={}'.format(Kp,Ki))
plt.step(data['Time'], data['T1H'], label='T1H', linestyle='--')
plt.step(data['Time'], data['T1S'], label='T1S', linestyle='-')
plt.step(data['Time'], data['SP1'], label='SP1', linestyle='-.', color='black', alpha=0.5)
plt.ylabel('Temperature (C)')
plt.xlabel('Time (s)')
plt.legend()
plt.grid()
plt.show()
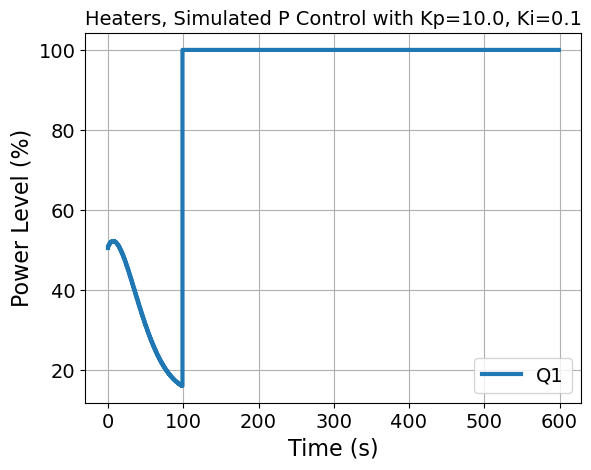
plt.title('Heaters, Simulated P Control with Kp={}, Ki={}'.format(Kp,Ki))
plt.step(data['Time'], data['Q1'], label='Q1')
plt.xlabel('Time (s)')
plt.ylabel('Power Level (%)')
plt.legend()
plt.grid()
plt.show()
return data
tclab_simulate_PI(Kp=10.0, Ki=0.1)
| T1H | T1S | Time | Q1 | SP1 | |
|---|---|---|---|---|---|
| 0 | 21.000000 | 21.000000 | 0 | 50.500000 | 26.0 |
| 1 | 21.160008 | 21.003947 | 1 | 50.960133 | 26.0 |
| 2 | 21.318382 | 21.015465 | 2 | 51.343409 | 26.0 |
| 3 | 21.474985 | 21.034101 | 3 | 51.653639 | 26.0 |
| 4 | 21.629687 | 21.059419 | 4 | 51.894521 | 26.0 |
| ... | ... | ... | ... | ... | ... |
| 595 | 52.528971 | 52.438260 | 595 | 100.000000 | 51.0 |
| 596 | 52.532759 | 52.442777 | 596 | 100.000000 | 51.0 |
| 597 | 52.536517 | 52.447258 | 597 | 100.000000 | 51.0 |
| 598 | 52.540244 | 52.451703 | 598 | 100.000000 | 51.0 |
| 599 | 52.543941 | 52.456112 | 599 | 100.000000 | 51.0 |
600 rows × 5 columns
3.8.5. Stability Analysis#
3.8.5.1. Continuous LTI System#
Let’s inspect the eigenvalues of \(\mathbf{A}\).
# Eigendecomposition analysis
from scipy.linalg import eig
def calc_eig(Kp,Ki,verbose=True):
A_PI = np.array([[-(Ua + Ub)/CpH, (Ub - alpha*P1*Kp)/CpH, -alpha*P1*Ki/CpH],
[Ub/CpS, -Ub/CpS, 0],
[0, 1, 0]])
w, vl = eig(A_PI)
if verbose:
for i in range(len(w)):
print("Eigenvalue",i,"=",w[i])
print("Eigenvector",i,"=",vl[:,i],"\n")
return w
calc_eig(Kp=1.5,Ki=0.01)
Eigenvalue 0 = (-0.05764412757011409+0j)
Eigenvector 0 = [ 0.00879784 -0.05754637 0.99830407]
Eigenvalue 1 = (-0.00940444864546306+0j)
Eigenvector 1 = [ 0.00763502 0.00940376 -0.99992664]
Eigenvalue 2 = (-0.002951423784422808+0j)
Eigenvector 2 = [-0.00277718 -0.0029514 0.99999179]
array([-0.05764413+0.j, -0.00940445+0.j, -0.00295142+0.j])
Here are rules for interpretting the eigenvalues and eigenvectors:
If all of the real components of the eigenvalues are negative, the system is stable and will return to the steady state (\(T^*_{S,1} \rightarrow 0\), \(T^*_{H,1} \rightarrow 0\)).
The eigenvectors corresponding to any eigenvalues with a positive real component shows the direction of exponential growth.
If any of the eigenvalues have non-zero imaginary components, the system osciallates.
Let’s perform a sensitivity analysis to see how the eigenvalues change.
Kp_range = np.arange(0.1,10,0.1)
Ki_range = np.arange(-3,0.1,0.1)
xv, yv = np.meshgrid(Kp_range, Ki_range)
# store eigenvalues in 3D array
s3 = (len(Ki_range),len(Kp_range),3)
s2 = (len(Ki_range),len(Kp_range))
ev = np.zeros(s3, dtype=complex)
positive_real_eig = np.zeros(s2)
nonzero_imag_eig = np.zeros(s2)
small_number = 1E-9
for i in range(len(Ki_range)):
for j in range(len(Kp_range)):
ev[i,j,:] = calc_eig(xv[i,j], np.power(10,yv[i,j]), verbose=False)[:]
positive_real_eig[i,j] = sum(np.real(ev[i,j,:]) >= -small_number)
nonzero_imag_eig[i,j] = sum(np.abs(np.imag(ev[i,j,:])) >= small_number)
fig, axs = plt.subplots(3,2)
fig.set_figheight(6)
fig.set_figwidth(4)
scale = 1000
# Loop over eigenvalues (rows)
for i in range(3):
# Plot contour of real component
CS = axs[i,0].contour(xv,yv,np.real(ev[:,:,i])*scale)
axs[i,0].set_box_aspect(1)
axs[i, 0].clabel(CS, inline=True, fontsize=10)
axs[i, 0].set_title('Re(' + str(scale) + '$\cdot \lambda_'+str(i)+'$)')
axs[i, 0].set_ylabel('log$_{10}$($K_I$)')
# Plot contour of imaginary component
CS = axs[i,1].contour(xv,yv,np.imag(ev[:,:,i])*scale)
axs[i,1].set_box_aspect(1)
axs[i, 1].clabel(CS, inline=True, fontsize=10)
axs[i, 1].set_title('Im(' + str(scale) + '$\cdot \lambda_'+str(i)+'$)')
# Bottom row: add labels to x-axis
if i == 2:
axs[i, 0].set_xlabel('$K_P$')
axs[i, 1].set_xlabel('$K_P$')
plt.tight_layout()
plt.show()
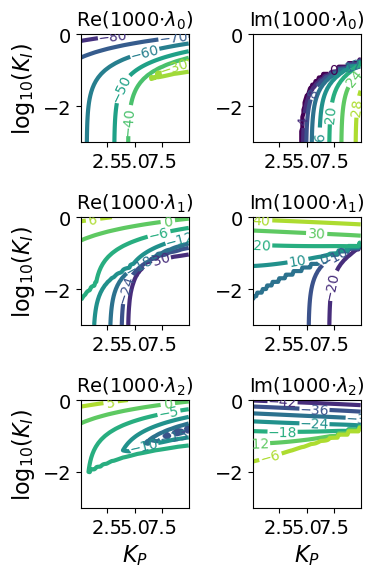
These six subplots show how the real (right) and imaginary (left) components of the three eigenvalues (rows) change as a function of \(K_P\) and \(K_I\). While these plots are informative, they are a little difficult to interpret.
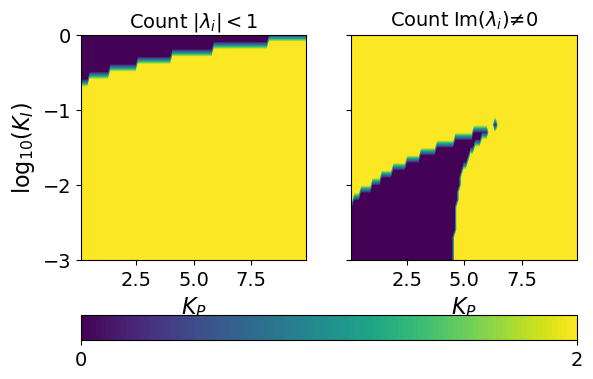
The code below plots the number of positive real eigenvalue componenets (left) and nonzero imaginary eigenvalue components (right). Yellow regions are 2 and purple regions are 0. Thus, choosing \(K_P\) and \(K_I\) values in the blue region on the left ensures the controller is stable. Likewise, selecting the blue region on the right ensures no oscillations. The exact region of these transitions depends on our assumptions about the mathematical model (and measurement noise). We are hoping the model is good enough to use this plot as a guideline for tuning the controller.
plt.figure()
fig, axs = plt.subplots(1,2, sharey=True)
axs[0].set_box_aspect(1)
cs = axs[0].contourf(xv,yv,positive_real_eig, levels=100)
axs[0].set_xlabel('$K_P$')
axs[0].set_ylabel('log$_{10}$($K_I$)')
axs[0].set_title('Count Re($\lambda_i$)$>0$')
axs[1].set_box_aspect(1)
cs = axs[1].contourf(xv,yv,nonzero_imag_eig, levels=100)
axs[1].set_xlabel('$K_P$')
#axs[1].set_ylabel('log$_{10}$($K_i$)')
axs[1].set_title('Count Im($\lambda_i$)$≠0$')
cbar = fig.colorbar(cs, ticks=[0, 2], orientation='horizontal', ax=axs[:])
#plt.tight_layout()
#plt.savefig('PI_stability.pdf')
plt.show()
<Figure size 640x480 with 0 Axes>
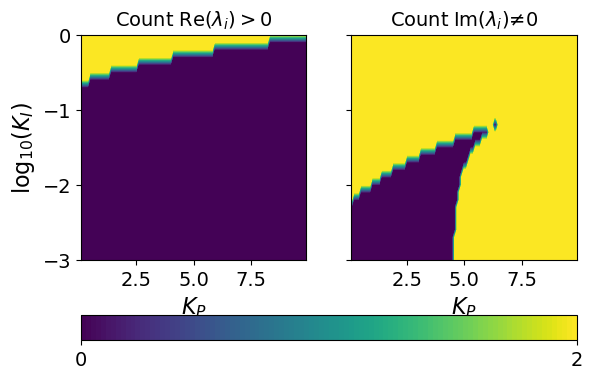
This is the plot you should reproduce and interpret in Lab 4: PI Control.
3.8.5.2. Discrete LTI System#
We can also analyze the eigenvalues of \(\mathbf{A}_d\)
def calc_eig_discrete(Kp,Ki,verbose=True):
A_PI = np.array([[-(Ua + Ub)/CpH, (Ub - alpha*P1*Kp)/CpH, -alpha*P1*Ki/CpH],
[Ub/CpS, -Ub/CpS, 0],
[0, 1, 0]])
A_d, B_d, C_d, D_d, dt = cont2discrete((A_PI, np.zeros((3,1)), np.eye(3), np.zeros((3,1))), dt=1, method='zoh')
w, vl = eig(A_d)
if verbose:
for i in range(len(w)):
print("Eigenvalue",i,"=",w[i])
print("Eigenvector",i,"=",vl[:,i],"\n")
return w
calc_eig_discrete(Kp=1.5,Ki=0.01)
Eigenvalue 0 = (0.9970529273850182+0j)
Eigenvector 0 = [-0.00277718 -0.0029514 0.99999179]
Eigenvalue 1 = (0.9906396348796779+0j)
Eigenvector 1 = [-0.00763502 -0.00940376 0.99992664]
Eigenvalue 2 = (0.943985826198011+0j)
Eigenvector 2 = [-0.00879784 0.05754637 -0.99830407]
array([0.99705293+0.j, 0.99063963+0.j, 0.94398583+0.j])
Kp_range = np.arange(0.1,10,0.1)
Ki_range = np.arange(-3,0.1,0.1)
xv, yv = np.meshgrid(Kp_range, Ki_range)
# store eigenvalues in 3D array
s3 = (len(Ki_range),len(Kp_range),3)
s2 = (len(Ki_range),len(Kp_range))
ev = np.zeros(s3, dtype=complex)
positive_real_eig = np.zeros(s2)
nonzero_imag_eig = np.zeros(s2)
within_unit_circle = np.zeros(s2)
small_number = 1E-9
for i in range(len(Ki_range)):
for j in range(len(Kp_range)):
ev[i,j,:] = calc_eig_discrete(xv[i,j], np.power(10,yv[i,j]), verbose=False)[:]
positive_real_eig[i,j] = sum(np.real(ev[i,j,:]) >= -small_number)
nonzero_imag_eig[i,j] = sum(np.abs(np.imag(ev[i,j,:])) >= small_number)
within_unit_circle[i,j] = sum(np.abs(ev[i,j,:]) <= 1+small_number)
plt.figure()
fig, axs = plt.subplots(1,2, sharey=True)
axs[0].set_box_aspect(1)
cs = axs[0].contourf(xv,yv,within_unit_circle, levels=100)
axs[0].set_xlabel('$K_P$')
axs[0].set_ylabel('log$_{10}$($K_I$)')
axs[0].set_title('Count $|\lambda_i|<1$')
axs[1].set_box_aspect(1)
cs = axs[1].contourf(xv,yv,nonzero_imag_eig, levels=100)
axs[1].set_xlabel('$K_P$')
#axs[1].set_ylabel('log$_{10}$($K_i$)')
axs[1].set_title('Count Im($\lambda_i$)$≠0$')
cbar = fig.colorbar(cs, ticks=[0, 2], orientation='horizontal', ax=axs[:])
#plt.tight_layout()
#plt.savefig('PI_stability.pdf')
plt.show()
<Figure size 640x480 with 0 Axes>
3.8.6. Simulate Performance with TC Lab#
%matplotlib inline
from tclab import setup, clock, Historian, Plotter
def simulate_PI_response(Kp=2.0, Ki=0.1):
""" Simulate a position form PI controller with the
TCLab digital twin.
This implementation contains a naive anti-windup for
position form. For our class, we will focus on velocity
form. This example shows position form to complete the website.
Arguments:
Kp: proportional gain
Ki: integral gain
Returns:
Nothing
Actions:
Performs simulation and plots the results
"""
def PI_naive(Kp=4, Ki=0.01, MV_bar=0, antiwindup=True):
""" Basic proportional-integral controller
Arguments:
Kp: proportional gain
MV_bar: steady-state value for manipulated variable
"""
# Minimum and maximum bounds for manipulated variables
MV_min = 0
MV_max = 100
# Initialize with MV_bar
MV = MV_bar
# Initialize integral
I = 0
# Set limits for integral windup protection
I_max = 100
I_min = -100
while True:
t_step, SP, PV, MV = yield MV
e = PV - SP # calculate error
I += t_step*e # apply integral
if antiwindup:
I = max(I_min, min(I_max, I)) # Apply bounds to prevent integral wind-up
MV = MV_bar - Kp*e - Ki*I # Apply control law
MV = max(MV_min, min(MV_max, MV)) # Apply manipulated variable upper and lower bounds
# Initialize in simulation mode
TCLab = setup(connected=False, speedup = 20)
SP = 40 # set point, deg C
tfinal = 600 # simulation horizon, seconds
t_step = 1 # time step, seconds
u_star = Ua*(SP-T_amb) / (alpha*100) # u at steady-state
print("MV_bar =",u_star)
# create control loop
controller1 = PI_naive(Kp, Ki, MV_bar=u_star)
controller1.send(None)
with TCLab() as lab:
h = Historian(lab.sources)
p = Plotter(h, tfinal)
for t in clock(tfinal, t_step):
PV = lab.T1 # measure the the process variable
MV = lab.U1 # get manipulated variable
MV = controller1.send([t_step, SP, PV, MV]) # PI control to determine the MV
lab.Q1(MV) # set the heater power
p.update() # log data
plt.show()
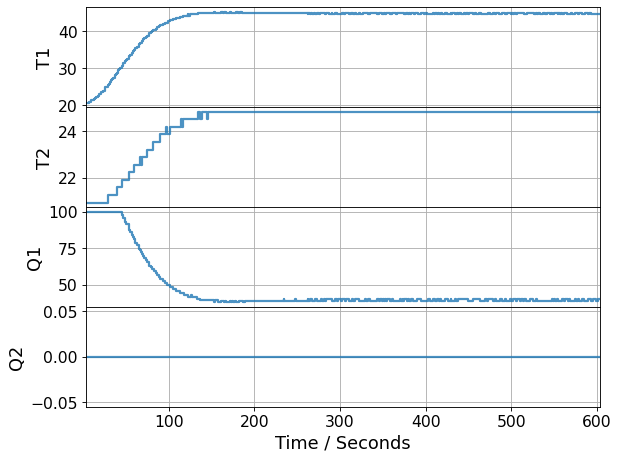
3.8.6.1. Large Gains: \(K_P = 8\) and \(K_I = 0.1\)#
simulate_PI_response(Kp=8, Ki=0.1)
TCLab Model disconnected successfully.
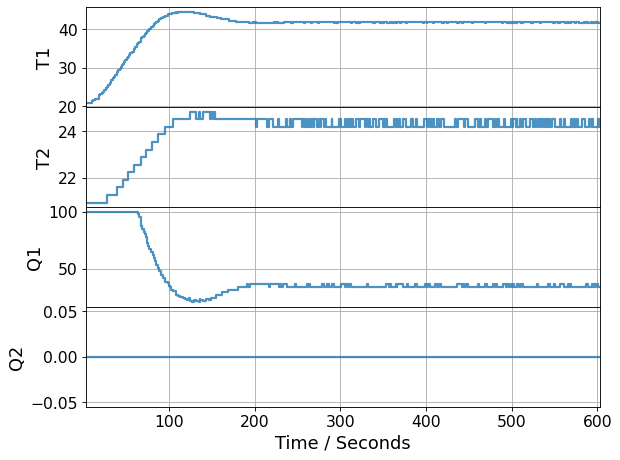
3.8.6.2. Small Gains: \(K_P = 4\) and \(K_I = 0.01\)#
simulate_PI_response(Kp = 4, Ki=0.01)
TCLab Model disconnected successfully.