3.8. Analysis of Proportional Only Controller#
3.8.1. Learning Objectives#
In this notebook, we will use a mathematical model for the TCLab to design and analyze a P-only controller.
After studying this notebook and completing the activities, you will be able to:
Agument dynamic system model with proportional (P) feedback control law to predict closed loop dynamics
Analyze stability of a linear (or linearized) system
Perform senstivity analysis to tune controller
3.8.2. Mathematical Model#
Recall the following second order model for the heater and sensor:
where \(T_{H,1}\) is the heater temperature, \(T_{S,1}\) is the sensor temperature, and \(T_{amb}\) is the ambient temperature (all in °C). We previously estimated the following:
\(U_a = 0.0261 \pm 0.0001\) (Watt/°C) is the heat transfer coefficient between the heater and ambient environment
\(U_b = 0.0222 \pm 0.0045\) (Watt/°C) is the heat transfer coefficient between the heater and sensor
\(C_{p}^{H} = 1.335 \pm 0.215\) (J/°C) is the heat capacity of the heater
\(C_{p}^{S} = 1.328 \pm 0.051\) (J/°C) is the heat capacity of the sensor
\(\alpha = 0.00016 \) (Watt / a.u. / %) is the heat delivered, this is a conversion factor
\(P_1 = 200\) (a.u.) is the maximum power of the heater
\(u_1 \in [0,100]\) (%) is the control signal
Everyone has their own TCLab hardware which due to manufacturing variability (e.g., different batches of parts, different amount of thermal paste) will have slightly different dynamics. You can adapt this notebook to analyze your TCLab hardware using your estimates for \(U_a\), \(U_b\), \(C_{p}^H\), and \(C_p^{S}\) from Lab 3.
3.8.3. Steady State Control Signal#
Let \(T_{set}\) be the set point (target) temperature.
What control signal \(\bar{u}_1\) is required to maintain the steady state \(\bar{T}_{H,1} = T_{set}\)? We start by making the substitution and setting the time derivatives to zero:
From the second equation, we see \(\bar{T}_{S,1} = T_{set}\), which makes sense. Let’s substitute this expression into the first equation and rearrange:
3.8.4. Proporational Control Law#
We will consider the proporational control law (position form):
Here, \(K_P > 0\) is the proportional gain and \(e(t) = T_{set}(t) - T_{S,1}(t)\) is the tracking error. If the temperature of the sensor is less than the set point, i.e., \(T_{S,1} < T_{set}\), then the control signal is greater than the heat input required to maintain steady state, i.e., \(u_{1} > \bar{u}_{1}\).
How can we tune \(K_p\)? How does our choice of \(K_p\) impact the closed loop dynamics of the system?
3.8.5. Closed-Loop Dynamics#
For convience, let’s define the temperatures as differences with repect to the set point:
We can now rewrite our dynamic model in terms of these temperatures. If we ignore changes in the set point, i.e., assume \(T_{set}\) is a constant, then \(\frac{dT_i}{dt} = \frac{dT^{*}_i}{dt}\) where subscript \(i\) is short hand for the subscripts \(_{H,1}\), \(_{S,1}\) and \(_{amb}\). Likewise, our model also has temperature differences, such as
Putting this all together gives:
Let’s write the steady state control signal in terms of the offset temperature:
Likewise, we will write the tracking error with the offset temperature:
Next, we subsitute our control law into the first differential equation of the TCLab model:
Notice the \(T^{*}_{amb}\) terms cancel!
We are left with the following system of differential equations:
Let’s collect similar terms:
Finally, we can write this as a linear differential equation in matrix form:
This system describes the closed loop dynamics. Take a few minutes to compare to the model for open loop dynamics. Notice the above model does not include \(u\) or \(\mathbf{B}\) because the control law is embedded in the closed loop model.
3.8.6. Numeric Simulation#
Let’s simulate the above system two ways to verify our math is correct.
3.8.6.1. Original Model: Open Loop#
import matplotlib.pyplot as plt
import numpy as np
from scipy.integrate import solve_ivp
# parameters
T_amb = 21 # deg C
alpha = 0.00016 # watts / (units P1 * percent U1)
P1 = 200 # P1 units (arbitrary units)
U1 = 50 # steady state value of u1 (percent), used for step test
T_set = 40 # setpoint (deg C)
# fitted parameters (see previous lab) for hardware
'''
Ua = 0.0261 # watts/deg C
Ub = 0.0222 # watts/deg C
CpH = 1.335 # joules/deg C
CpS = 1.328 # joules/deg C
'''
# fitted parameters (repeat Lab 3) for TCLab digital twin
Ua = 0.05 # watts/deg C
Ub = 0.05 # watts/deg C
CpH = 5.0 # joules/deg C
CpS = 1.0 # joules/deg C
t_final = 800
t_step = 1
t_expt = np.arange(0,t_final,t_step)
# model solution
def deriv(t, y):
# right hand side of differential equation
T1H, T1S = y
dT1H = (-(Ua + Ub)*T1H + Ub*T1S + alpha*P1*U1 + Ua*T_amb)/CpH
dT1S = Ub*(T1H - T1S)/CpS
return [dT1H, dT1S]
# numerical integrate
soln_original = solve_ivp(deriv, [min(t_expt), max(t_expt)], [T_amb, T_amb], t_eval=t_expt)
# plot
plt.plot(soln_original.t, soln_original.y[0],label='T1H')
plt.plot(soln_original.t, soln_original.y[1],label='T1S')
plt.legend()
plt.xlabel('Time [second]')
plt.ylabel('Temperature [° C]')
plt.grid()
plt.show()
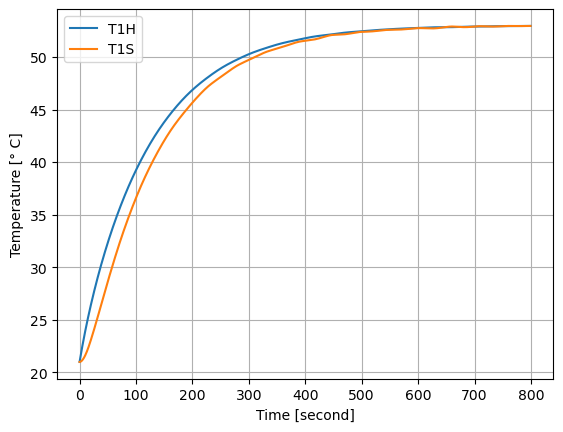
Compare this plot to our model identification lab. This is a simulation of a step response.
3.8.6.2. New Model: Open Loop#
Now let’s simulate the new model. We’ll set \(K_p = 0\) to turn off the controller (no gain).
def simulate_response(Kp=0.0):
""" Simulate the dynamic response of the system to a step change
using proportional control with gain Kp.
Arguments:
Kp: the proportional control gain
Returns:
None
Actions:
Plots the response of the system
"""
print("This assumes u_bar =",Ua*(T_set - T_amb)/alpha/P1,"%")
A = np.array([[-(Ua + Ub)/CpH, (Ub - alpha*P1*Kp)/CpH],
[Ub/CpS, -Ub/CpS]])
# model solution
def closed_loop(t, y):
return A @ y
soln_P = solve_ivp(closed_loop, [min(t_expt), max(t_expt)], [T_amb - T_set, T_amb-T_set], t_eval=t_expt)
plt.plot(soln_P.t, soln_P.y[0] + T_set,label='T1H')
plt.plot(soln_P.t, soln_P.y[1] + T_set,label='T1S')
plt.title("$K_p$ = "+str(Kp))
plt.grid()
plt.legend()
plt.xlabel('Time [second]')
plt.ylabel('Temperature [° C]')
plt.show()
simulate_response(Kp=0.0)
This assumes u_bar = 29.6875 %
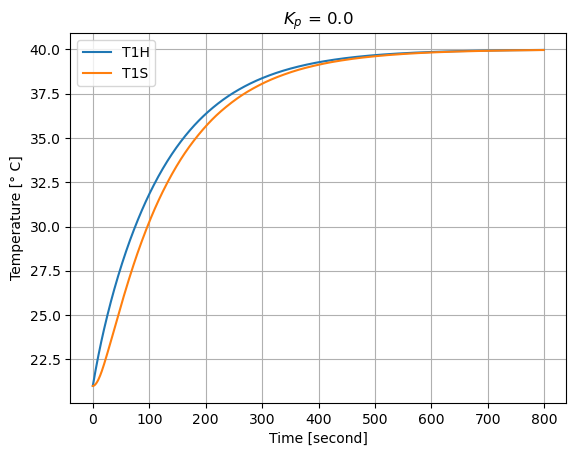
Question: Why does our simulation approach \(T_{set}\)?
Answer: We used \(T_{set}\) to calculate \(\bar{u}\). This was important to get the \(T_{amb}\) terms to cancel in the derivation above.
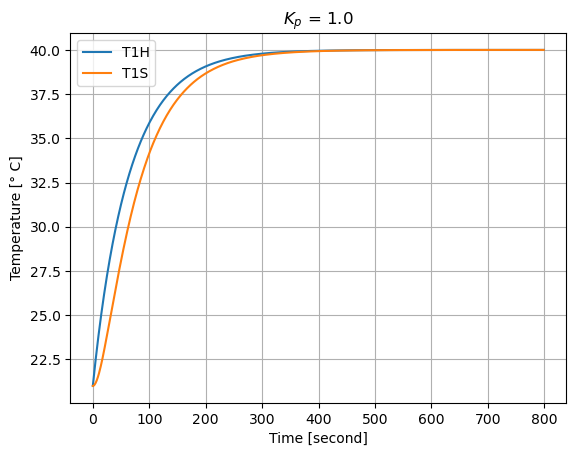
3.8.6.3. New Model: Closed Loop#
Now let’s look at the closed loop response for a few different Kp values.
simulate_response(Kp=1.0)
This assumes u_bar = 29.6875 %
simulate_response(Kp=5.0)
This assumes u_bar = 29.6875 %
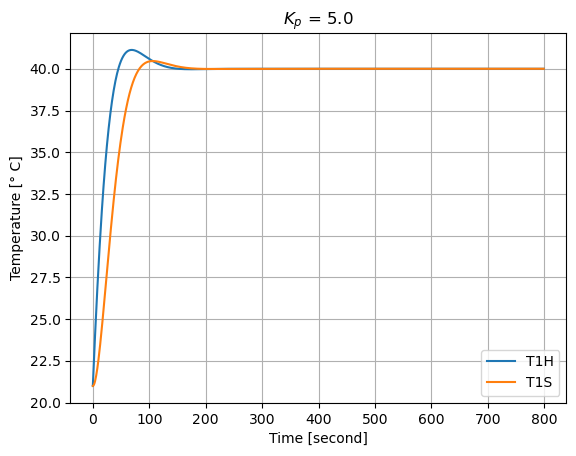
Perform a simple sensitivity analysis and answer the following discussion questions:
What happens with small and large \(K_p\) values? Does the solution overshoot or undershoot? How long does it take to reach the set point?
Can you find the value of \(K_p\) that is the transition between overshoot and undershoot?
3.8.7. Stability Analysis: Numerical#
We will now perform a more sophisticated analysis to understand how the choice of \(K_P\) impacts the closed loop dynamics. Specifcally, we’ll inspect the eigenvalues of \(\mathbf{A}\).
# Eigendecomposition analysis
from scipy.linalg import eig
def calc_eig(Kp,verbose=True):
A = np.array([[-(Ua + Ub)/CpH, (Ub - alpha*P1*Kp)/CpH],
[Ub/CpS, -Ub/CpS]])
w, vl = eig(A)
if verbose:
for i in range(len(w)):
print("Eigenvalue",i,"=",w[i])
print("Eigenvector",i,"=",vl[:,i],"\n")
return w
calc_eig(Kp=0.1)
Eigenvalue 0 = (-0.008675106837823632+0j)
Eigenvector 0 = [0.63706969 0.77080621]
Eigenvalue 1 = (-0.06132489316217637+0j)
Eigenvector 1 = [-0.22090244 0.97529591]
array([-0.00867511+0.j, -0.06132489+0.j])
calc_eig(Kp=10.0)
Eigenvalue 0 = (-0.034999999999999996+0.04974937185533099j)
Eigenvector 0 = [0.72057669+0.j 0.20016019-0.66385626j]
Eigenvalue 1 = (-0.034999999999999996-0.04974937185533099j)
Eigenvector 1 = [0.72057669-0.j 0.20016019+0.66385626j]
array([-0.035+0.04974937j, -0.035-0.04974937j])
Here are rules for interpretting the eigenvalues and eigenvectors:
If all of the real components of the eigenvalues are negative, the system is stable and will return to the steady state (\(T^*_{S,1} \rightarrow 0\), \(T^*_{H,1} \rightarrow 0\)).
The eigenvectors corresponding to any eigenvalues with a positive real component shows the direction of exponential growth.
If any of the eigenvalues have non-zero imaginary components, the system osciallates.
Let’s perform a sensitivity analysis to see how the eigenvalues change.
Kp_range = np.arange(0.1,10,0.1)
n = len(Kp_range)
eig_values = np.zeros((n,2), dtype=complex)
for i,kp in enumerate(Kp_range):
eig_values[i,:] = calc_eig(kp, verbose=False)[:]
plt.figure()
plt.plot(Kp_range, np.real(eig_values))
plt.xlabel("$K_P$")
plt.ylabel("real($\lambda_i$)")
plt.legend(['$\lambda_1$','$\lambda_2$'])
plt.grid()
plt.figure()
plt.plot(Kp_range, np.imag(eig_values))
plt.xlabel("$K_P$")
plt.ylabel("imag($\lambda_i$)")
plt.legend(['$\lambda_1$','$\lambda_2$'])
plt.grid()
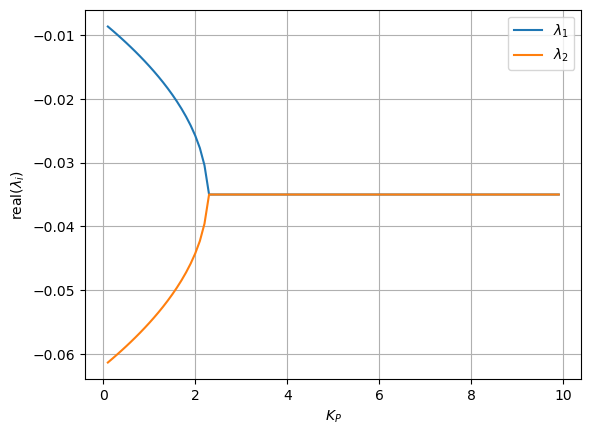
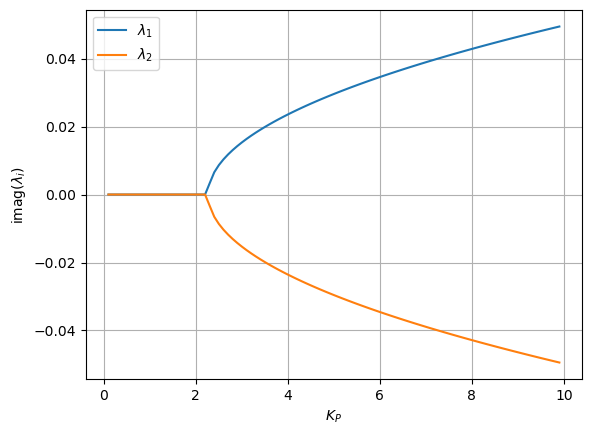
Interpret the plots above to find the value of \(K_p\) that is the transition from undershooting (no oscillations) and overshooting (with oscillations).
### BEGIN SOLUTION
calc_eig(2.3, verbose=True)
### END SOLUTION
Eigenvalue 0 = (-0.035+0.0033166247903554j)
Eigenvector 0 = [0.28676967+0.06340716j 0.95589889+0.j ]
Eigenvalue 1 = (-0.035-0.0033166247903554j)
Eigenvector 1 = [0.28676967-0.06340716j 0.95589889-0.j ]
array([-0.035+0.00331662j, -0.035-0.00331662j])
3.8.8. Stability Analysis: Analytical#
Finally, let’s calculate the eigenvalues analytically. Recall, eigenvalues \(\lambda\) and eigenvectors \(\mathbf{v}\) of \(\mathbf{A}\) satisfy:
We can calculate the eigenvalues \(\lambda\) using the determinant.
This gives the characteristic equation:
Multiplying both sides by \(C_p^H~C_p^S\) gives:
Finally, algebriac manipulation give:
Recall the quadratic formula:
Is the controller always stable?
In order for the controller to be unstable, \(\mathrm{Real}(\lambda_i) > 0\) for at least one of the eigenvalues. This can only happen if
However, \(a>0\) and \(c>0\) because \(Cp^S\), \(Cp^H\), \(U_a\), \(U_b\), \(\alpha\), \(P_a\), \(K_P > 0\). Thus, \(0 > 4 a c\) is not possible and the controller is stable for all choices of \(K_P\) (ignoring changes in setpoint).
When does the controller oscillate?
The closed-loop system oscillates if \(\mathrm{Imag}(\lambda) \neq 0\) for at least two eigenvalues. This occurs when
K_p_critical = (CpH*Ub + (Ua + Ub)*CpS)**2/(4*CpH*CpS*Ub*alpha*P1) - Ua/(alpha*P1)
print("Critical K_p = ",round(K_p_critical,3))
Critical K_p = 2.266
3.8.9. Simulate Performance with TC Lab#
%matplotlib inline
from tclab import setup, clock, Historian, Plotter
def simulate_P_only(Kp=1.9, SP=50, tfinal=600, t_step=1):
""" Simulate proportional only controller using TCLab 'digital twin' mode
Arguments:
Kp: proportional gain (%/degC)
SP: setpoint (degC)
tfinal: simulation time (seconds)
t_step: time step (seconds)
MV_bar: steady-state value for manipulated variable (%)
"""
def P_only(Kp, MV_bar):
""" Basic proportional only controller
Arguments:
Kp: proportional gain
MV_bar: steady-state value for manipulated variable
"""
# Minimum and maximum bounds for manipulated variables
MV_min = 0
MV_max = 100
# Initialize with MV_bar
MV = MV_bar
while True:
SP, PV, MV = yield MV
e = PV - SP # calculate error
MV = MV_bar - Kp*e # apply control law
MV = max(MV_min, min(MV_max, MV)) # Apply upper and lower bounds
# Initialize in simulation mode
TCLab = setup(connected=False, speedup = 20)
u_star = Ua*(SP-T_amb) / (alpha*P1) # u at steady-state
print("MV_bar =",u_star)
# create control loop
controller1 = P_only(Kp, MV_bar=u_star)
controller1.send(None)
with TCLab() as lab:
# Create historican and plotter
h = Historian(lab.sources)
p = Plotter(h, tfinal)
# initialize maximum power for heater 1
lab.P1 = P1
# Loop over the time steps
for t in clock(tfinal, t_step):
# measure the the process variable (sense)
PV = lab.T1
# get manipulated variable (sense)
MV = lab.U1
# P control to determine the MV (compute)
MV = controller1.send([SP, PV, MV])
# set the heater power (actuate)
lab.Q1(MV)
# log data
p.update()
3.8.9.1. Small \(K_p\)#
simulate_P_only(Kp=0.5)
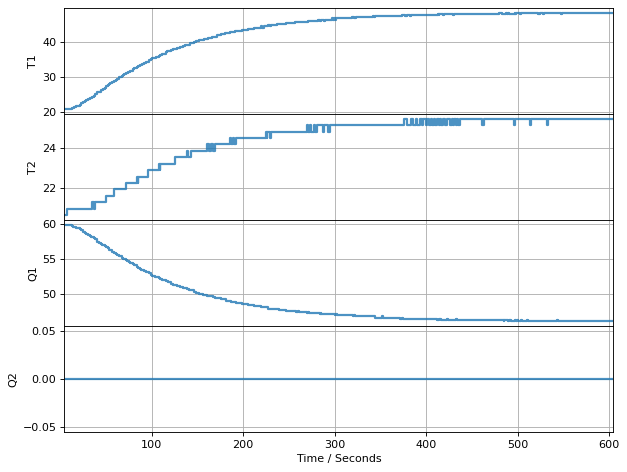
TCLab Model disconnected successfully.
3.8.9.2. Moderate \(K_P\)#
simulate_P_only(Kp=7)
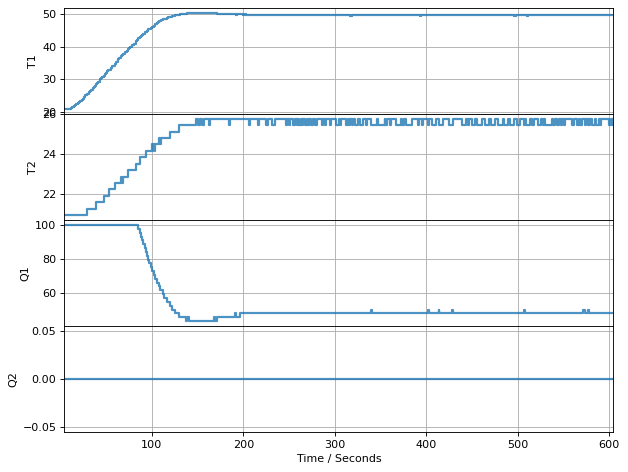
TCLab Model disconnected successfully.
3.8.9.3. Large \(K_P\)#
simulate_P_only(Kp=100.0)
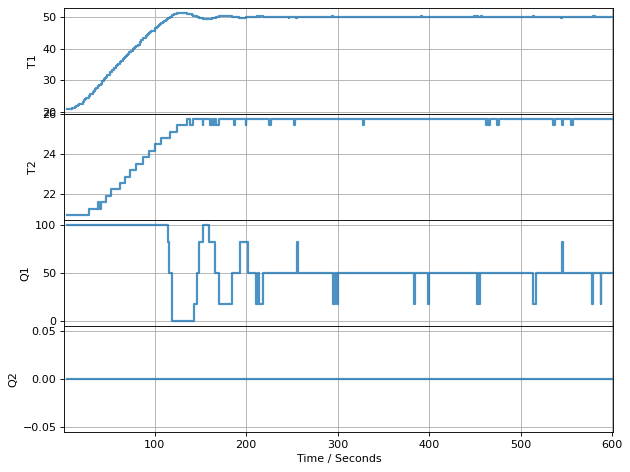
TCLab Model disconnected successfully.
3.8.9.4. Discussion:#
Were the responses overdamped or underdamped?
Did the system reach the setpoint?
Did the results match the mathematical analysis? If not, why?