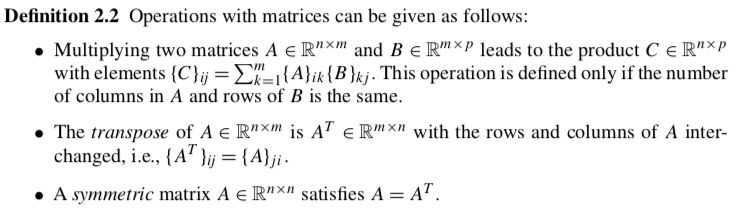
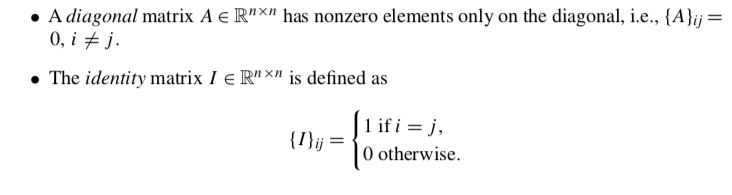
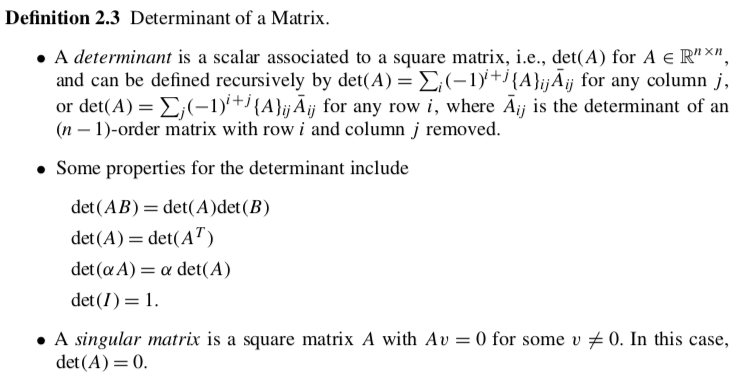
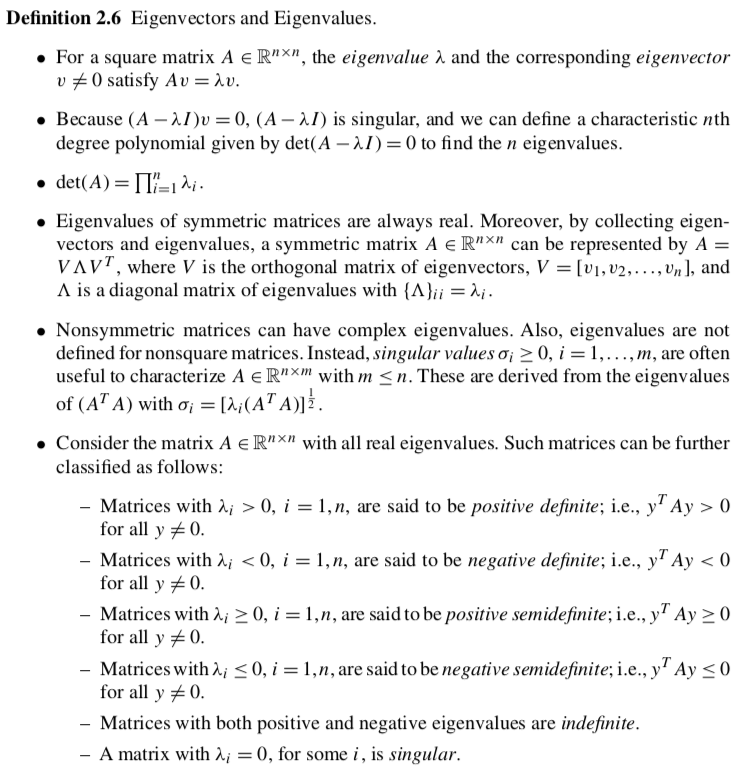
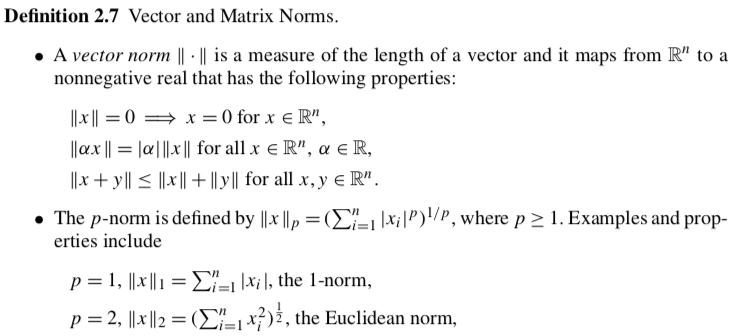
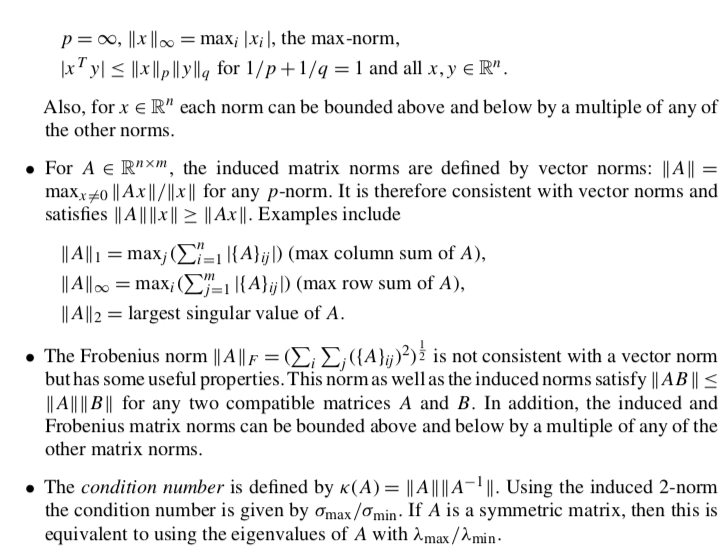
Screenshots from Section 2.2 Vectors and Matrices in Biegler (2010)
Recommended Links
Tip: We will mostly use SciPy for linear algebra. (It has more sophisticated capabilities than NumPy.) We will use NumPy if/when SciPy does not offer a specific command.
# Load required Python libraries.
import matplotlib.pyplot as plt
import numpy as np
from scipy import linalg
The notation for lectures will (hopefully) be obvious from context. I sometimes use Greek letters for constants and Roman letters for variables... unless the Greek letters have engineering or scientific meaning.
# Generate random matrices
n = 2
m = 3
Ao = np.random.rand(n,m)
Bo = np.random.rand(m,n)
print("Ao = ")
print(Ao)
print("\nBo = ")
print(Bo)
# What is the dimension of A*B? Try to answer this without the computer.
# Calculate A*B using Python
print("\nAo*Bo =")
print(Ao.dot(Bo))
Ao = [[0.90471685 0.17317304 0.40300532] [0.63393766 0.90146479 0.61500922]] Bo = [[0.34621818 0.9393221 ] [0.67416793 0.95718324] [0.61310823 0.40727659]] Ao*Bo = [[0.67706301 1.17971349] [1.20428661 1.7088175 ]]
Activity
# Transpose
print("transpose(Ao) = \n",Ao.transpose(),"\n")
# Create a square matrix. Is it symmetric?
# Identify matrix
print("I = \n",np.identity(3),"\n")
transpose(Ao) = [[0.90471685 0.63393766] [0.17317304 0.90146479] [0.40300532 0.61500922]] I = [[1. 0. 0.] [0. 1. 0.] [0. 0. 1.]]
# Generate random matrices
nd = 2
Ad = np.random.rand(nd,nd)
Bd = np.random.rand(nd,nd)
Cd = np.array([(1, 0, 0),(-2, 0, 0),(0, 1, 1)])
print("Ad = ")
print(Ad)
print("\nBd = ")
print(Bd)
print("\nCd = ")
print(Cd)
Ad = [[0.35144304 0.40331999] [0.98819481 0.83989719]] Bd = [[0.24359748 0.02035267] [0.32634249 0.99856976]] Cd = [[ 1 0 0] [-2 0 0] [ 0 1 1]]
Activity
# Property 1
print("det(A*B) = ",linalg.det(Ad.dot(Bd)))
print("det(A)*det(B) = ",linalg.det(Ad)*linalg.det(Bd))
det(A*B) = -0.024461085784763897 det(A)*det(B) = -0.02446108578476388
# Property 2
# Property 3
# Property 4
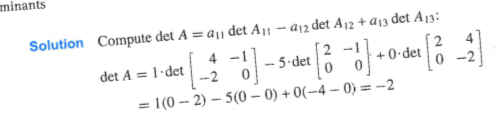
Another Example (for at home)
Below is an example from Linear Algebra and Its Applications by David C. Lay, 3rd edition that shows how to calculate a determinant by hand.

![]()
Activity
print("rank(A_o) = ",np.linalg.matrix_rank(Ao),"\n")
# Fill in remainder here.
rank(A_o) = 2
Activity
# Task 1
# Task 2
# Task 3
# Is this an orthogonal matrix? Yes, no, or need more information?
theta = 0.2
Q = np.array([(np.cos(theta), -np.sin(theta)),(np.sin(theta),np.cos(theta))])
print("Q = ")
print(Q)
Q = [[ 0.98006658 -0.19866933] [ 0.19866933 0.98006658]]
Consider the linear system $A_l x = b_l$
Al = np.array([(4,3),(6,3)])
bl = np.array([1,0])
print("Al = \n",Al)
print("\nbl = \n",bl)
Al = [[4 3] [6 3]] bl = [1 0]
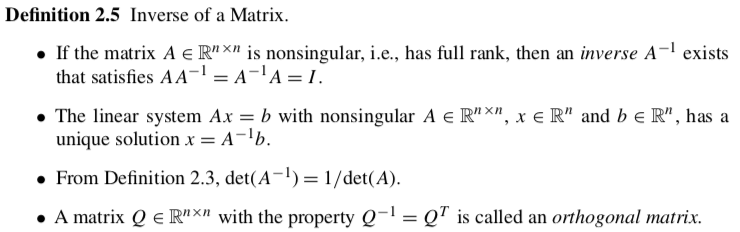
Calculate $x$ by explicitly using $A_l^{-1}$. Hint: Use linalg.inv().
Ainv = linalg.inv(Al)
print("Ainv = \n",Ainv,"\n")
# Now calculate and print x
Ainv = [[-0.5 0.5 ] [ 1. -0.66666667]]
Perform LU decomposition on $A_l$. What structures do the $P$, $L$, and $U$ matrices have?
# Create test linear systems
A = np.random.rand(4,4)
print("A = \n",A,"\n")
b = np.random.rand(4,1)
print("b = \n",b,"\n")
A = [[0.68331246 0.29422836 0.22419151 0.41620186] [0.05988483 0.58705665 0.07246852 0.45441375] [0.6024749 0.36997327 0.13872522 0.45388322] [0.34311843 0.47101812 0.51826738 0.25525007]] b = [[0.00949348] [0.82027783] [0.90273651] [0.37915841]]
# Perform LU decomposition
(P, L, U) = linalg.lu(A)
# Permutation matrix
print("P = \n",P)
# Lower diagonal matrix
print("L = \n",L)
# Upper diagonal matrix
print("U = \n",U)
# Verify result
print("P*L*U = \n",P.dot(L.dot(U)),"\n")
P = [[1. 0. 0. 0.] [0. 1. 0. 0.] [0. 0. 0. 1.] [0. 0. 1. 0.]] L = [[ 1. 0. 0. 0. ] [ 0.08763901 1. 0. 0. ] [ 0.50213986 0.5759686 1. 0. ] [ 0.88169751 0.19696885 -0.18479522 1. ]] U = [[ 0.68331246 0.29422836 0.22419151 0.41620186] [ 0. 0.56127076 0.05282059 0.41793823] [ 0. 0. 0.37526888 -0.19446077] [ 0. 0. 0. -0.03133716]] P*L*U = [[0.68331246 0.29422836 0.22419151 0.41620186] [0.05988483 0.58705665 0.07246852 0.45441375] [0.6024749 0.36997327 0.13872522 0.45388322] [0.34311843 0.47101812 0.51826738 0.25525007]]
print("inv(P) = \n",linalg.inv(P),"\n")
print("transpose(P) = \n",P.T,"\n")
print("P.T*P = \n",np.matmul(P.T,P),"\n")
inv(P) = [[ 1. -0. -0. 0.] [ 0. 1. -0. 0.] [ 0. 0. -0. 1.] [ 0. 0. 1. 0.]] transpose(P) = [[1. 0. 0. 0.] [0. 1. 0. 0.] [0. 0. 0. 1.] [0. 0. 1. 0.]] P.T*P = [[1. 0. 0. 0.] [0. 1. 0. 0.] [0. 0. 1. 0.] [0. 0. 0. 1.]]
Yes! We see that $P^T = P^{-1}$ and $P^T \cdot P = I$.
Defines LU decomposition as follows:
$$ P \cdot A = L \cdot U$$Consider $$A \cdot x=b$$
Using MATLAB LU definition
$$P\cdot A = L\cdot U$$$$P^T \cdot P \cdot A = P^T \cdot L \cdot U$$$$A = P^T \cdot L \cdot U$$Substitute into linear system:
$$P^T \cdot L \cdot U \cdot x = b$$$$ L \cdot U \cdot x = P \cdot b$$Let $y = U \cdot x$ and substitute.
Step 1. Solve $L \cdot y = P \cdot b$ for $y$
Step 2. Solve $U \cdot x = y$ for $x$
Pb = P.dot(b)
print("P*b = ",Pb,"\n")
yLU = linalg.solve(L,Pb)
print("yLU = ",yLU,"\n")
xLU = linalg.solve(U,yLU)
print("xLU = ",xLU,"\n")
P*b = [[0.00949348] [0.82027783] [0.37915841] [0.90273651]] yLU = [[ 0.00949348] [ 0.81944583] [-0.09758371] [ 0.71492782]] xLU = [[ 9.4407442 ] [ 19.58501477] [-12.08206663] [-22.81406129]]
Defines LU decomposition as:
$$ A = P \cdot L \cdot U $$Consider $$A \cdot x=b$$
SciPy LU definition
$$A = P \cdot L\cdot U$$Substitute into linear system:
$$P \cdot L \cdot U \cdot x = b$$$$P^T \cdot P \cdot L \cdot U \cdot x = P^T \cdot b$$$$L \cdot U \cdot x = P^T \cdot b$$Let $y = U \cdot x$ and substitute.
Step 1. Solve $L \cdot y = P^T \cdot b$ for $y$
Step 2. Solve $U \cdot x = y$ for $x$
## LU decomposition algorithm.
Pb = (P.T).dot(b)
print("P.T*b = ",Pb,"\n")
yLU = linalg.solve(L,Pb)
print("yLU = ",yLU,"\n")
xLU = linalg.solve(U,yLU)
print("xLU = ",xLU,"\n")
P.T*b = [[0.00949348] [0.82027783] [0.37915841] [0.90273651]] yLU = [[ 0.00949348] [ 0.81944583] [-0.09758371] [ 0.71492782]] xLU = [[ 9.4407442 ] [ 19.58501477] [-12.08206663] [-22.81406129]]
What is the difference? A transpose.
linalg.solve¶Solve the linear system using linalg.solve
x = linalg.solve(Al,bl)
print("x = \n",x)
x = [-0.5 1. ]
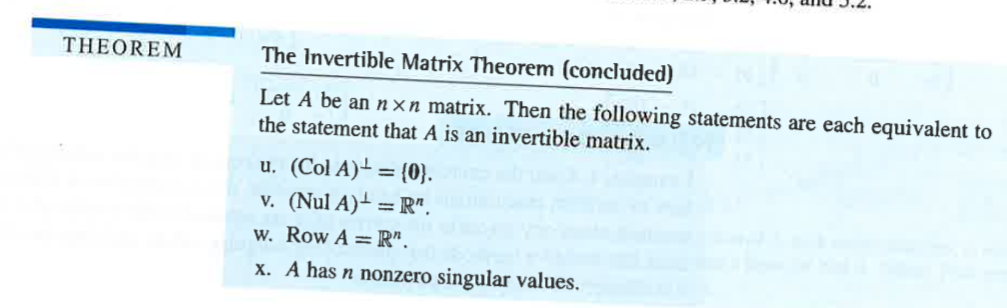
Screenshots from Linear Algebra and Its Applications by David C. Lay, 3rd edition
Ae = np.array([(0, -4, -6), (-1, 0, -3), (1, 2, 5)])
print("Ae = \n",Ae)
Ae = [[ 0 -4 -6] [-1 0 -3] [ 1 2 5]]
Activity
# Expect negative eigenavalues?
# Yes / No / Cannot tell from inspect?
# Write a sentence to justify your answer.
### Calculate eigenvalues
# Matrix Al
print("Matrix = \n",Al,"\n")
l, v = linalg.eig(Al)
print("Eigenvalues = ",l,"\n")
print("Eigenvectors = \n",v,"\n")
Matrix = [[4 3] [6 3]] Eigenvalues = [ 7.77200187+0.j -0.77200187+0.j] Eigenvectors = [[ 0.62246561 -0.53222953] [ 0.78264715 0.8466001 ]]
Notes will be given in class.
Activity
# Matrix Al
print("Matrix = \n",Al,"\n")
U,s,Vh = linalg.svd(Al)
print("U = \n",U,"\n")
print("S = \n",s,"\n")
print("Vh = \n",Vh,"\n")
## Rank (from inspecting singular values)?
Matrix = [[4 3] [6 3]] U = [[-0.59581566 -0.80312122] [-0.80312122 0.59581566]] S = [8.33557912 0.71980602] Vh = [[-0.86400595 -0.50348159] [ 0.50348159 -0.86400595]]
x = np.random.rand(3,1)
print("x = \n",x)
y = np.random.rand(3,1)
print("y = \n",y)
x = [[0.02808233] [0.20488865] [0.77425602]] y = [[0.73113614] [0.20737529] [0.97754014]]
Activity
Activity