Assignment Overview: In this assignment, we will complete the function unconstrained_newton which implements four Hessian options (exact, SR1 approximation, BFGS approximation, steepest descent) and three globalization strategies (none, line search, trust region). We will then compare 10 algorithm variations on three test problems.
The best way to really learn the algorithms discussed in lecture is to implement them yourselves. Creating a function like unconstrained_newton from scratch takes a lot of time and comfort with Python. Instead, we will start with fairly complete version of unconstrained_newton. You will need to fill in the following details:
This assignment could take a long time, especially if you are still learning Python. Recognizing this, we will try a new grading policy for this assignment.
Instructions: To be eligible for full credit on the assignment, you need to:
After reading through the entire assignment, please prepare pseudocode for the following functions/algorithms:
Please turn in this pseudocode via Gradescope.
Reminder: pseudocode should not look like Python code copied to paper. Instead, pseudocode should clearly communicate the main steps of the algorithm with flow logic. Add lots of comments. It should not be programming language specific.
Below is a library of helpful functions. Most of these came from in class examples.
# Load required Python libraries.
import matplotlib.pyplot as plt
import numpy as np
from scipy import linalg
## Check is element of array is NaN
def check_nan(A):
return np.sum(np.isnan(A))
## Calculate gradient with central finite difference
def my_grad_approx(x,f,eps1,verbose=False):
'''
Calculate gradient of function my_f using central difference formula
Inputs:
x - point for which to evaluate gradient
f - function to consider
eps1 - perturbation size
Outputs:
grad - gradient (vector)
'''
n = len(x)
grad = np.zeros(n)
if(verbose):
print("***** my_grad_approx at x = ",x,"*****")
for i in range(0,n):
# Create vector of zeros except eps in position i
e = np.zeros(n)
e[i] = eps1
# Finite difference formula
my_f_plus = f(x + e)
my_f_minus = f(x - e)
# Diagnostics
if(verbose):
print("e[",i,"] = ",e)
print("f(x + e[",i,"]) = ",my_f_plus)
print("f(x - e[",i,"]) = ",my_f_minus)
grad[i] = (my_f_plus - my_f_minus)/(2*eps1)
if(verbose):
print("***** Done. ***** \n")
return grad
## Calculate gradient using central finite difference and my_hes_approx
def my_hes_approx(x,grad,eps2):
'''
Calculate Hessian of function my_f using central difference formula and my_grad
Inputs:
x - point for which to evaluate gradient
grad - function to calculate the gradient
eps2 - perturbation size (for Hessian NOT gradient approximation)
Outputs:
H - Hessian (matrix)
'''
n = len(x)
H = np.zeros([n,n])
for i in range(0,n):
# Create vector of zeros except eps in position i
e = np.zeros(n)
e[i] = eps2
# Evaluate gradient twice
grad_plus = grad(x + e)
grad_minus = grad(x - e)
# Notice we are building the Hessian by column (or row)
H[:,i] = (grad_plus - grad_minus)/(2*eps2)
return H
## Linear algebra calculation
def xxT(u):
'''
Calculates u*u.T to circumvent limitation with SciPy
Arguments:
u - numpy 1D array
Returns:
u*u.T
Assume u is a nx1 vector.
Recall: NumPy does not distinguish between row or column vectors
u.dot(u) returns a scalar. This functon returns an nxn matrix.
'''
n = len(u)
A = np.zeros([n,n])
for i in range(0,n):
for j in range(0,n):
A[i,j] = u[i]*u[j]
return A
## Analyze Hessian
def analyze_hes(B):
print(B,"\n")
l = linalg.eigvals(B)
print("Eigenvalues: ",l,"\n")
Below is the main function. You need to complete details in four functions.
def unconstrained_newton(calc_f,calc_grad,calc_hes,x0,verbose=False,max_iter=50,
algorithm="newton",globalization="line-search", # specify algorithm
eps_dx=1E-6,eps_df=1E-6, # Convergence tolerances (all)
eta_ls=0.25,rho_ls=0.9,alpha_max=1.0, # line search parameters
delta_max_tr=10.0,delta_0_tr=2.0, # trust region parameters
kappa_1_tr = 0.25, kappa_2_tr = 0.75, gamma_tr=0.125 # trust region parameters
):
'''
Newton-Type Methods for Unconstrained Nonlinear Continuous Optimization
Arguments (required):
calc_f : function f(x) to minimize [scalar]
calc_grad: gradient of f(x) [vector]
calc_hes: Hessian of f(x) [matrix]
Arguments (options):
algorithm : specify main algorithm.
choices: "newton", "sr1", "bfgs", "steepest-descent"
globalization : specify globalization strategy
choices: "none", "line-search", "trust-region"
eps_dx : tolerance for step size norm (convergence), eps1 in notes
eps_df : tolerance for gradient norm (convergence), eps2 in notes
eta_ls : parameter for Goldstein-Armijo conditions (line search only)
rho_ls : parameter to shrink (backstep) line search
alpha_max : initial step length scaling for line search and/or steepest-descent
delta_max_tr : maximum trust region size
delta_0_tr : initial trust region size
kappa_1_tr : 'shrink' tolerance for trust region
kappa_2_tr : 'expand' tolerance for trust region
gamma_tr : 'accept step' tolerance for trust region
Returns:
x : iteration history for x (decision variables) [list of numpy arrays]
f : iteration history for f(x) (objective values) [list of numpy arrays]
p : iteration history for p (steps)
B : iteration history for Hessian approximations [list of numpy arrays]
'''
# Allocate outputs as empty lists
x = [] # decision variables
f = [] # objective values
p = [] # steps
grad = [] # gradients
alpha = [] # line search / steepest descent step scalar
B = [] # Hessian approximation
delta = [] # trust region size
rho = [] # trust region actual/prediction ratio
step_accepted = [] # step status for trust region. True means accepted. False means rejected.
# Note: alpha, delta and rho will remain empty lists unless used in the algorithm below
# Store starting point
x.append(x0)
k = 0
flag = True
# Print header for iteration information
print("Iter. \tf(x) \t\t||grad(x)|| \t||p|| \t\tmin(eig(B)) \talpha \t\tdelta \t\tstep")
while flag and k < max_iter:
# Evaluate f(x) at current iteration
f.append(calc_f(x[k]))
# Evaluate gradient
grad.append(calc_grad(x[k]))
if(check_nan(grad[k])):
print("WARNING: gradiant calculation returned NaN")
break
if verbose:
print("\n")
print("k = ",k)
print("x = ",x[k])
print("grad = ",grad[k])
print("f = ",f[k])
# Calculate exact Hessian or update approximation
if(algorithm == "newton"):
B.append(calc_hes(x[k]))
elif k == 0 or algorithm == "steepest-descent":
# Initialize or set to identity
B.append(np.eye(len(x0)))
elif algorithm == "sr1" or algorithm == "bfgs":
# Change in x
s = x[k] - x[k-1]
# Change in gradient
y = grad[k] - grad[k-1]
if verbose:
print("s = ",s)
print("y = ",y)
if algorithm == "sr1": # Calculate SR1 update
dB = sr1_update(s, y, k, B, verbose)
B.append(B[k-1] + dB)
else: # Calculate BFGS update
dB = bfgs_update(s, y, k, B, verbose)
B.append(B[k-1] + dB)
else:
print("WARNING. algorithm = ",algorithm," is not supported.")
break
if verbose:
print("B = \n",B[k])
print("B[k].shape = ",B[k].shape)
if(check_nan(B[k])):
print("WARNING: Hessian update returned NaN")
break
c = np.linalg.cond(B[k])
if c > 1E12:
flag = False
print("Warning: Hessian approximation is near singular.")
print("B[k] = \n",B[k])
else:
# Solve linear system to calculate step
pk = linalg.solve(B[k],-grad[k])
if globalization == "none":
if algorithm == "steepest-descent":
# Save step and scale by alpha_max
p.append(pk*alpha_max)
else:
# Take full step
p.append(pk)
# Apply step and calculate x[k+1]
x.append(x[k] + p[k])
elif globalization == "line-search":
# Line Search Function
update, alphak = line_search(x, f, grad, calc_f, pk, k, alpha_max, eta_ls, rho_ls, verbose)
# Now the line search is complete, apply final value of alphak
p.append(update)
# Save alpha
alpha.append(alphak)
# Apply step and calculate x[k+1]
x.append(x[k] + p[k])
elif globalization == "trust-region":
# Trust region function
update = trust_region(x, grad, B, delta, k, pk, delta_0_tr, verbose)
p.append(update)
### Trust region management
# Actual reduction
ared = f[k] - calc_f(x[k] + p[k])
# Predicted reduction
pred = -(grad[k].dot(p[k]) + 0.5*p[k].dot(B[k].dot(p[k])))
# Calculate rho
if ared == 0 and pred == 0:
# This occurs is the gradient is zero and Hessian is P.D.
rho.append(1E4)
else:
rho.append(ared/pred)
if(verbose):
print("f[k] = ",f[k])
print("p[k] = ",p[k])
print("f(x[k] + p[k]) = ",calc_f(x[k] + p[k]))
print("ared = ",ared)
print("pred = ",pred)
print("rho = ",rho[k])
## Check trust region shrink/expand logic
if rho[k] < kappa_1_tr:
# Shrink trust region
delta.append(kappa_1_tr*linalg.norm(p[k]))
elif rho[k] > kappa_2_tr and np.abs(linalg.norm(p[k]) - delta[k]) < 1E-6:
# Expand trust region
delta.append(np.min([2*delta[k], delta_max_tr]))
else:
# Keep trust region same size
delta.append(delta[k])
# Compute step
if rho[k] > gamma_tr:
# Take step
x.append(x[k] + p[k])
step_accepted.append(True)
else:
# Skip step
x.append(x[k])
step_accepted.append(False)
else:
print("Warning: globalization strategy not supported")
if verbose:
print("p = ",p[k])
# Calculate norms
norm_p = linalg.norm(p[k])
norm_g = linalg.norm(grad[k])
# Calculate eigenvalues of Hessian (for display only)
min_ev = np.min(np.real(linalg.eigvals(B[k])))
'''
print("f[k] = ",f[k])
print("norm_g = ",norm_g)
print("norm_g = ",norm_p)
print("min_ev = ",min_ev)
'''
print(k,' \t{0: 1.4e} \t{1:1.4e} \t{2:1.4e} \t{3: 1.4e}'.format(f[k],norm_g,norm_p,min_ev),end='')
# Python tip. The expression 'if my_list' is false if 'my_list' is empty
if not alpha:
# alpha is an empty list
print(' \t -------',end='')
else:
# otherwise print value of alpha
print(' \t{0: 1.2e}'.format(alpha[k]),end='')
if not delta:
# delta is an empty list
print(' \t -------',end='')
else:
# otherwise print value of alpha
print(' \t{0: 1.2e}'.format(delta[k]),end='')
if not step_accepted:
print(' \t -----')
else:
if step_accepted[k]:
print(' \t accept')
else:
print(' \t reject')
# Check convergence criteria.
flag = (norm_p > eps_dx) and (norm_g > eps_df)
# Update iteration counter
k = k + 1
if(k == max_iter and flag):
print("Reached maximum number of iterations.")
print("x* = ",x[-1])
return x,f,p,B
def sr1_update(s, y, k, B, verbose):
"""
Function that implements the sr1 optimization algorithm
Inputs:
s : Change in x
y : Change in gradient
k : Iteration number
B : Hessian approximation
verbose : toggles verbose output (True or False)
Outputs:
dB : Update to Hessian approximation
"""
# SR1 formulation
u = y - B[k-1].dot(s)
denom = (u).dot(s)
# Formula: dB = u * u.T / (u.T * s) if u is a column vector.
if abs(denom) <= 1E-10:
# Skip update
dB = 0
else:
# Calculate update
dB = xxT(u)/denom
if(verbose):
print("SR1 update denominator, (y-B[k-1]*s).T*s = ",denom)
print("SR1 update u = ",u)
print("SR1 update u.T*u/(u.T*s) = \n",dB)
return dB #return the update to the Hessian approximation
def bfgs_update(s, y, k, B, verbose):
"""
Function that implements the BFGS optimization algorithm
Inputs:
s : Change in x
y : Change in gradient
k : Iteration number
B : Hessian approximation
verbose : toggles verbose output (True or False)
Outputs:
dB : Update to Hessian approximation
"""
# Define constant used to check norm of the update
# See Eq. (3.19) in Biegler (2010)
C2 = 1E-4
# YOUR SOLUTION HERE
return dB #return the update to the Hessian approximation
def line_search(x, f, grad, calc_f, pk, k, alpha_max, eta_ls, rho_ls, verbose):
"""
Function that implements the line search globalization strategy
Inputs:
x : decision variables
f : objective values
grad : gradients
calc_f : function f(x) to minimize [scalar]
pk : step
k - Iteration number
alpha_max : initial step length scaling for line search and/or steepest-descent
eta_ls : parameter for Goldstein-Armijo conditions (line search only)
rho_ls : parameter to shrink (backstep) line search
verbose : toggles verbose output (True or False)
Outputs:
update : update to p
alphak : update to alpha
"""
# Flag - continue line search?
ls = True
## Initialize alpha
alphak = alpha_max
if(verbose):
print("\t LINE SEARCH")
while ls:
# Calculate test point (if step accepted)
xtest = x[k] + alphak*pk
# Evaluate f(x) at test point. This is used for Armijo and Goldstein conditions
ftest = calc_f(xtest)
# YOUR SOLUTION HERE
# Now the line search is complete, apply final value of alphak
update = alphak*pk
return update, alphak
def trust_region(x, grad, B, delta, k, pk, delta_0_tr, verbose):
"""
Function that implements the trust region globalization strategy
Inputs:
x : decision variables
grad : gradients
B : Hessian approximation
delta : trust region size
k : Iteration number
pk : step
delta_0_tr : initial trust region size
verbose : toggles verbose output (True or False)
Outputs:
update : update to p
"""
### Initialize trust region radius
if(k == 0):
delta.append(delta_0_tr)
grad_zero = (linalg.norm(grad[k]) < 1E-14)
### Powell dogleg step
# Calculate Cauchy step (pC)
denom = grad[k].dot(B[k].dot(grad[k]))
if verbose:
print("TR: Cauchy step. grad.T*B*grad = ",denom)
if denom > 0:
# Term in ( ) is a scalar
pC = -(grad[k].dot(grad[k])/denom)*grad[k]
elif grad_zero:
pC = np.zeros(len(x[k]))
else:
pC = - delta[k]/linalg.norm(grad[k])*grad[k]
# Use Newton step (calculate above)
pN = pk
# Determine step
if linalg.norm(pN) <= delta[k]:
# Take Newton step. pN is inside the trust region.
update = pN
# YOUR SOLUTION HERE
return update
For each feature, please indicate the status upon submission.
Status: please choose from "implemented and tested", "implemented but testing incomplete", "implementation incomplete", "did not attempt implementation"
Details: Please describe in a few sentences or bullet points the outstanding tasks.
Status: please choose from "implemented and tested", "implemented but testing incomplete", "implementation incomplete", "did not attempt implementation"
Details: Please describe in a few sentences or bullet points the outstanding tasks.
Status: please choose from "implemented and tested", "implemented but testing incomplete", "implementation incomplete", "did not attempt implementation"
Details: Please describe in a few sentences or bullet points the outstanding tasks.
Status: please choose from "implemented and tested", "implemented but testing incomplete", "implementation incomplete", "did not attempt implementation"
Details: Please describe in a few sentences or bullet points the outstanding tasks.
In the remainder of the assignment, we will compare using several variants of Newton-type methods in different test problems taken from in class examples. For each problem at a given starting point, we will consider ten algorithm cases:
We will then assess each candidate solution by the eigenvalues of the true Hessian. The norm of the gradient is already displayed.
All of this analysis has been automated in a function below.
def check_sln(x,calc_hes):
Hval = calc_hes(x)
l, v = linalg.eig(Hval)
print("Eigenvalues of Hessian at x* = ",l)
def benchmark(x0,calc_f,calc_grad,calc_hes,verbose,cases=range(0,10)):
'''
Test 10 algorithm cases for a single starting point
Arguments:
x0 - starting point
calc_f - function to evaluate objective
calc_grad - function to evaluate gradient
calc_hes - function to evaluate Hessian
verbose - toggles verbose output (True or False)
cases - list of cases to consider. Especially helpful for debugging.
For example, setting cases=[1, 2] runs only case 2 and 3 (recall, Python starting counting at 0)
'''
for i in cases:
if i == 0:
print("***Case 1: Newton method with exact Hessian and no globalization strategy***")
x1,f,p,B = unconstrained_newton(calc_f,calc_grad,calc_hes,x0,verbose,
algorithm="newton",globalization="none")
check_sln(x1[-1],calc_hes)
print("\n")
if i == 1:
print("***Case 2: Newton method with exact Hessian and line search***")
x2,f,p,B = unconstrained_newton(calc_f,calc_grad,calc_hes,x0,verbose,
algorithm="newton",globalization="line-search")
check_sln(x2[-1],calc_hes)
print("\n")
if i == 2:
print("***Case 3: Newton method with exact Hessian and trust region***")
x3,f,p,B = unconstrained_newton(calc_f,calc_grad,calc_hes,x0,verbose,
algorithm="newton",globalization="trust-region")
check_sln(x3[-1],calc_hes)
print("\n")
if i == 3:
print("***Case 4: Quasi-Newton method with SR1 Hessian approximation and no globalization strategy***")
x4,f,p,B = unconstrained_newton(calc_f,calc_grad,calc_hes,x0,verbose,
algorithm="sr1",globalization="none")
check_sln(x4[-1],calc_hes)
print("\n")
if i == 4:
print("***Case 5: Quasi-Newton method with SR1 Hessian approximation and line search***")
x5,f,p,B = unconstrained_newton(calc_f,calc_grad,calc_hes,x0,verbose,
algorithm="sr1",globalization="line-search")
check_sln(x5[-1],calc_hes)
print("\n")
if i == 5:
print("***Case 6: Quasi-Newton method with SR1 Hessian approximation and trust region***")
x6,f,p,B = unconstrained_newton(calc_f,calc_grad,calc_hes,x0,verbose,
algorithm="sr1",globalization="trust-region")
check_sln(x6[-1],calc_hes)
print("\n")
if i == 6:
print("***Case 7: Quasi-Newton method with BFGS Hessian approximation and no globalization strategy***")
x7,f,p,B = unconstrained_newton(calc_f,calc_grad,calc_hes,x0,verbose,
algorithm="bfgs",globalization="none")
check_sln(x7[-1],calc_hes)
print("\n")
if i == 7:
print("***Case 8: Quasi-Newton method with BFGS Hessian approximation and line search***")
x8,f,p,B = unconstrained_newton(calc_f,calc_grad,calc_hes,x0,verbose,
algorithm="bfgs",globalization="line-search")
check_sln(x8[-1],calc_hes)
print("\n")
if i == 8:
print("***Case 9: Quasi-Newton method with BFGS Hessian approximation and trust region***")
x9,f,p,B = unconstrained_newton(calc_f,calc_grad,calc_hes,x0,verbose,
algorithm="bfgs",globalization="trust-region")
check_sln(x9[-1],calc_hes)
print("\n")
if i == 9:
print("***Case 10: Steepest Descent and line search***")
x10,f,p,B = unconstrained_newton(calc_f,calc_grad,calc_hes,x0,verbose,
algorithm="steepest-descent",globalization="line-search")
check_sln(x10[-1],calc_hes)
print("\n")
Start debugging your function with the following problem:
$$\min_x ~~ x_1^2 + (x_2 -1)^2$$def my_f(x):
return x[0]**2 + (x[1]-1)**2
def my_grad(x):
return np.array([2*x[0], 2*(x[1] - 1) ])
def my_hes(x):
return 2*np.eye(2)
The following code below runs cases 1 through 10. You can specify only a subset using the cases keyword.
x0 = np.array([-3.0,2.0])
benchmark(x0,my_f,my_grad,my_hes,False)
Classify the solutions.
Answer:
Should we expect the SR1, BFGS, and steepest descent (all with line search) to always have the same results for the first iteration? Explain in a few sentences.
Answer:
For this problem, should we always expect all of the cases to converge to the same solution (regardless of starting point)? Explain in a few sentences.
Answer:
Consider a scalar function $f(x): \mathbb{R} \rightarrow \mathbb{R}$. Recall
$$f(x) = 0.5 (x-1)^4 + (x+1)^3 - 10 x^2 + 5 x$$$$f'(x) = 6 - 8 x - 3 x^2 + 2 x^3$$$$f''(x) = -8 - 6 x + 6 x^2 $$## Define f(x)
f_ = lambda x : 0.5*(x[0]-1)**4 + (x[0]+1)**3 - 10*x[0]**2 + 5*x[0]
## Define f'(x)
df_ = lambda x : (6 - 8*x[0] - 3*x[0]**2 + 2*x[0]**3)*np.ones(1)
## Define f''(x)
ddf_ = lambda x : (-8 - 6*x[0] + 6*x[0]**2)*np.ones((1,1))
x0 = np.ones(1)*(-3.0)
benchmark(x0,f_,df_,ddf_,False)
x0 = np.zeros(1)
benchmark(x0,f_,df_,ddf_,False)
Which cases converged to a local maximizer?
Answer:
Which cases converged to a local minimizer?
Answer:
Based on these results, which algorithms do you recommend for non-convex problems?
Answer:
Now we will benchmark the algorithms using Example 2.19.
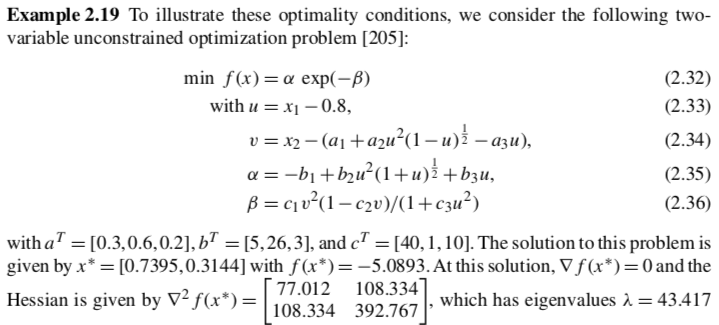
Consider the function $g(z) = \sqrt{z}$, which is only defined for $z \geq 0$. We will shortly learn how handle bounds/inequality constraints in an optimization problem.
But for this assignment, we will focus on algorithms for unconstrained nonlinear optimization. We will use a smoothed approximation to ensure $g(z)$ is defined and twice-differentiable over $z \in \mathbb{R}$. Consider:
$$g(z) \approx \sqrt{\max(z,0)}$$This ensures that $g(z)$ is defined over $z \in \mathbb{R}$. But what about twice-differentiable? We will further approximate
$$\max(z,0) \approx \frac{1}{2}\left(\sqrt{z^2 + 10^{-4}} + z \right)$$Below is an implementation of the Example 2.19 that uses this smoothed approximation.
def asqrt(z):
'''
Approximate/smoothed square root
'''
return np.sqrt(0.5*(np.sqrt(z**2 + 1E-4) + z))
def ex2_19_smoothed(x,verbose=False):
''' Evaluate function given above at point x
Inputs:
x - vector with 2 elements
Outputs:
f - function value (scalar)
'''
# Constants
a = np.array([0.3, 0.6, 0.2])
b = np.array([5, 26, 3])
c = np.array([40, 1, 10])
# Intermediates. Recall Python indicies start at 0
u = x[0] - 0.8
s = asqrt(1-u)
s2 = asqrt(1+u)
v = x[1] -(a[0] + a[1]*u**2*s-a[2]*u)
alpha = -b[0] + b[1]*u**2*s2+ b[2]*u
beta = c[0]*v**2*(1-c[1]*v)/(1+c[2]*u**2)
f = alpha*np.exp(-beta)
if verbose:
print("##### my_f at x = ",x, "#####")
print("u = ",u)
print("sqrt(1-u) = ",s)
print("sqrt(1+u) = ",s2)
print("v = ",v)
print("alpha = ",alpha)
print("beta = ",beta)
print("f(x) = ",f)
print("##### Done. #####\n")
return f
my_f2 = lambda x : ex2_19_smoothed(x,verbose=False)
my_grad2 = lambda x : my_grad_approx(x,my_f2,1E-6,verbose=False)
my_hes2 = lambda x : my_hes_approx(x,my_grad2,1E-6)
x0 = np.array([0.7, 0.3])
benchmark(x0,my_f2,my_grad2,my_hes2,False)
Which cases do not converge to the known solution?
Answer:
What is happening with the SR1 and BFGS update when no globalization strategy is used? Hint: This is related to the square root approximation.
Answer:
x0 = np.array([0.0, 0.0])
benchmark(x0,my_f2,my_grad2,my_hes2,False)
Did any of the 10 cases converge to the known solution?
What do you recommend trying next to more reliably solve this particular problem?